In robotics and motion planning, a velocity obstacle, commonly abbreviated VO, is the set of all velocities of a robot that will result in a collision with another robot at some moment in time, assuming that the other robot maintains its current velocity.[1] If the robot chooses a velocity inside the velocity obstacle then the two robots will eventually collide, if it chooses a velocity outside the velocity obstacle, such a collision is guaranteed not to occur.[1]
This algorithm for robot collision avoidance has been repeatedly rediscovered and published under different names: in 1989 as a maneuvering board approach,[2] in 1993 it was first introduced as the "velocity obstacle",[3] in 1998 as collision cones,[4] and in 2009 as forbidden velocity maps.[5] The same algorithm has been used in maritime port navigation since at least 1903.[6]
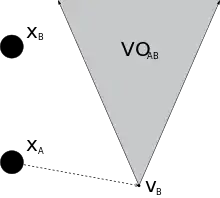
The velocity obstacle for a robot induced by a robot may be formally written as



where has position and radius , and has position , radius , and velocity . The notation represents a disc with center and radius .








Variations include common velocity obstacles (CVO),[7] finite-time-interval velocity obstacles (FVO),[8] generalized velocity obstacles (GVO),[9] hybrid reciprocal velocity obstacles (HRVO),[10] nonlinear velocity obstacles (NLVO),[11] reciprocal velocity obstacles (RVO),[12] and recursive probabilistic velocity obstacles (PVO).[13]
References
- 1 2 Fiorini, P.; Shiller, Z. (July 1998). "Motion planning in dynamic environments using velocity obstacles". The International Journal of Robotics Research. 17 (7): 760–772. CiteSeerX 10.1.1.56.6352. doi:10.1177/027836499801700706. ISSN 0278-3649. S2CID 9073894.
- ↑ Tychonievich, L. P.; Zaret, D.; Mantegna, R.; Evans, R.; Muehle, E.; Martin, S. (1989). A maneuvering-board approach to path planning with moving obstacles. International Joint conference on Artificial Intelligence (IJCAI). pp. 1017–1021.
- ↑ Fiorini, P.; Shiller, Z. (1993). Motion planning in dynamic environments using the relative velocity paradigm. IEEE Conference on Robotics and Automation. pp. 560–565.
- ↑ Chakravarthy, A.; Ghose, D. (September 1998). "Obstacle avoidance in a dynamic environment: A collision cone approach". IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans. 28 (5): 562–574. CiteSeerX 10.1.1.101.2050. doi:10.1109/3468.709600.
- ↑ Damas, B.; Santos-Victor, J. (2009). Avoiding moving obstacles: the forbidden velocity map. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). pp. 4393–4398.
- ↑ Miller, F. S.; Everett, A. F. (1903). Instructions for the Use of Martin's Mooring Board and Battenberg's Course Indicator. Authority of the Lords of Commissioners of the Admiralty.
- ↑ Abe, Y.; Yoshiki, M. (November 2001). Collision avoidance method for multiple autonomous mobile agents by implicit cooperation. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 01). New York, N.Y.: IEEE. pp. 1207–1212. doi:10.1109/IROS.2001.977147.
- ↑ Guy, S. J.; Chhugani, J.; Kim, C.; Satish, N.; Lin, M.; Manocha, D.; Dubey, P. (August 2009). ClearPath: Highly parallel collision avoidance for multi-agent simulation. ACM SIGGRAPH/Eurographics Symposium on Computer Animation (SCA 09). New York, N.Y.: ACM. pp. 177–187. doi:10.1145/1599470.1599494.
- ↑ Wilkie, D.; v.d. Berg, J.; Manocha, D. (October 2009). Generalized velocity obstacles. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 09). New York, N.Y.: IEEE. doi:10.1109/IROS.2009.5354175.
- ↑ Snape, J.; v.d. Berg, J.; Guy, S. J.; Manocha, D. (October 2009). Independent navigation of multiple mobile robots with hybrid reciprocal velocity obstacles. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 09). New York, N.Y.: IEEE.
- ↑ Large, F.; Sekhavat, S.; Shiller, Z.; Laugier, C. (December 2002). Using non-linear velocity obstacles to plan motions in a dynamic environment. IEEE International Conference on Control, Automation, Robotics and Vision (ICARCV 02). New York, N.Y.: IEEE. pp. 734–739. doi:10.1109/ICARCV.2002.1238513.
- ↑ v.d. Berg, J.; Lin, M.; Manocha, D. (May 2008). Reciprocal velocity obstacles for real-time multi-agent navigation. IEEE International Conference on Robotics and Automation (ICRA 08). New York, N.Y.: IEEE. pp. 1928–1935. CiteSeerX 10.1.1.127.6140. doi:10.1109/ROBOT.2008.4543489.
- ↑ Fulgenzi, C.; Spalanzani, A.; Laugier, C. (April 2007). Dynamic obstacle avoidance in uncertain environment combining PVOs and occupancy grid. IEEE International Conference on Robotics and Automation (ICRA 07). New York, N.Y.: IEEE. pp. 1610–1616. CiteSeerX 10.1.1.696.8423. doi:10.1109/ROBOT.2007.363554.