互質因子算法
互質因子算法(Prime-factor FFT algorithm, PFA),又稱為Good-Thomas算法[1] [2],是一種快速傅立葉變換(FFT),把N = N1N2大小的離散傅立葉變換重新表示為N1 * N2大小的二維離散傅立葉變換,其中N1與N2需互質。變成N1和N2大小的傅立葉變換後,可以繼續遞迴使用PFA,或用其他快速傅立葉變換算法來計算。
較流行的Cooley-Tukey算法經由mixed-radix一般化後,也是把N = N1N2大小的離散傅立葉變換分割為N1和N2大小的轉換,但和互質因子算法 (PFA)作法並不相同,不應混淆。Cooley-Tukey算法的N1與N2不需互質,可以是任何整數。然而有個缺點是比PFA多出一些乘法,和單位根twiddle factors相乘。相對的,PFA的缺點則是N1與N2需互質 (例如N 是2次方就不適用),而且要藉由中國剩餘定理來進行較複雜的re-indexing。互質因子算法 (PFA)可以和mixed-radix Cooley-Tukey算法相結合,前者將N 分解為互質的因數,後者則用在重複質因數上。
PFA也與nested Winograd FFT算法密切相關,後者使用更為精巧的二維摺積技巧分解成N1 * N2的轉換。因而一些較古老的論文把Winograd算法稱為PFA FFT。
儘管PFA和Cooley-Tukey算法並不相同,但有趣的是Cooley和Tukey在他們1965年發表的有名的論文中,沒有發覺到高斯和其他人更早的研究,只引用Good在1958年發表的PFA作為前人的FFT結果。剛開始的時候人們對這兩種作法是否不同有點困惑。
算法
離散傅立葉變換(DFT)的定義如下:

PFA將輸入和輸出re-indexing,代入DFT公式後轉換成二維DFT。
Re-indexing
設N = N1N2,N1與N2兩者互質,然後把輸入n 和輸出k 一一對應到

因N1與N2 互質,故根據最大公因數表現定理,對每個n 都存在滿足上式的整數n1與n2,且在同餘N 之下n1可以調整至0~N1 –1之間,n2可以調整至0~N2 –1之間。並根據同餘理論易知滿足上式且在以上範圍內的整數n1與n2是唯一的。這稱為Ruritanian 映射 (或Good's 映射),


舉例來說:
如果對於任一 都可以對應到


















因N1與N2 互質,故根據中國剩餘定理,對於每組 ( k1 , k2 ) (其中k1在0~N1 – 1之間, k2在0~N2 – 1之間),都有存在且唯一的k 在0~N - 1之間且滿足上兩式。這稱為 CRT 映射。 CRT 映射的另一種表示法如下

( 也可以改成對輸入n 用 CRT 映射以及對輸出k 用Ruritanian 映射)
DFT re-expression
表示方法一:
將以上的re-indexing代入DFT公式裡指數部分的nk 之中,

( 因為e2πi = 1,所以兩個指數的k 部份可以分別模N1與N2 )。剩下的部分變成

則內部和外部的總和分別轉換成大小為N2與N1的DFT。
表示方法二:
如果令

令 ,相當於取 的餘數,,





![{\displaystyle X[((k_{1}N_{2}+k_{2}N_{1}))_{N}]=\sum _{n=0}^{N-1}x[((n_{1}N_{2}+n_{2}N_{1}))_{N}]e^{-j{\frac {2\pi }{N_{2}N_{1}}}(k_{1}N_{2}+k_{2}N_{1})(n_{1}N_{2}+n_{2}N_{1})}}](../I/fbf599d06e8729134d9c00b5e4b2bde2b24fcb94.svg)
![{\displaystyle =\sum _{n=0}^{N-1}x[((n_{1}N_{2}+n_{2}N_{1}))_{N}]e^{-j{\frac {2\pi }{N_{2}N_{1}}}(k_{1}n_{1}N_{2}N_{2}+k_{2}n_{2}N_{1}N_{1}+k_{1}n_{2}N_{2}N_{1}+k_{2}n_{1}N_{1}N_{2})}}](../I/d53333685253fd2cadbcdd46da32523c33846820.svg)
![{\displaystyle =\sum _{n=0}^{N-1}x[((n_{1}N_{2}+n_{2}N_{1}))_{N}]e^{-j{\frac {2\pi }{N_{1}}}(k_{1}n_{1}N_{2})}e^{-j{\frac {2\pi }{N_{2}}}(k_{2}n_{2}N_{1})}}](../I/66d77514852130c9cc9b66e7b7c7d8e2d7df3f06.svg)
![{\displaystyle =\sum _{n_{2}=0}^{N_{2}-1}\{\sum _{n_{1}=0}^{N_{1}-1}x[((n_{1}N_{2}+n_{2}N_{1}))_{N}]e^{-j{\frac {2\pi }{N_{1}}}(k_{1}n_{1}N_{2})}\}e^{-j{\frac {2\pi }{N_{2}}}(k_{2}n_{2}N_{1})}.}](../I/d12904e0a977ad3e1142221bf48c1f697790be62.svg)
對於每一個 都要做一個 點的 ,而因為 有 個,所以需要 個 點 ,




對於每一組都要做一個 點的 ,而因為 為常數,有 個,所以需要 個 點 ,


因此如果要計算複雜度,可以乘法器的數量當作考量,
假設 點的 需要 個乘法器,

假設 點的 需要 個乘法器,

則總共需要 個乘法器。

範例
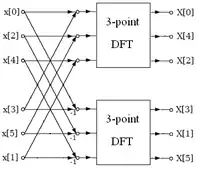
以N = 6為例,有兩種可能,N1 = 2, N2 = 3或N1 = 3, N2 = 2。
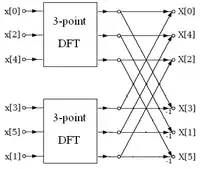
第一種情形所產生的流程圖如左圖所示。先做2次3點DFT後再做3次2點DFT。
第二種情形所產生的流程圖如右圖所示。先做3次2點DFT後再做2次3點DFT。
其中2點DFT的部份因構造單純,皆以交錯的蝴蝶圖來顯示。
可以看出即使在這個簡單的例子中,輸入和輸出的index也都經過有點複雜的重新排列。
與Cooley-Tukey算法的比較
如首段所述,Cooley-Tukey算法和互質因子算法 (PFA)曾被誤認為很類似。兩者皆有各自優點可適用於不同狀況,因此分辨它們的不同是很重要的。在1965年著名的論文中發表的Cooley-Tukey算法,是在DFT的定義
中代入n = n1 + n2N1 , k = k1N2 + k2,則


比PFA多了一些要乘的因子 (稱為twiddle factors ),但index較為簡單,且適用於任何N1、N2。在J. Cooley稍後發表的關於FFT歷史探討的論文[4]中使用N = 24點FFT為例,顯示兩種作法在index結構上的不同。

注釋
- I. J. Good, , J. R. Statist. Soc. B, 1958, 20(2): 361–372
- L. H. Thomas, , Applications of Digital Computers, 1963
- S. C. Chan and K. L. Ho, , IEEE Trans. Circuits and Systems, 1991, 38(8): 951–953.
- J. Cooley, P. Lewis, and P. Welch, , IEEE Transactions on Audio and Electroacoustics, 1967, 15(2): 76–79
外部連結
- fft note by Burrus(页面存档备份,存于)
- cnx(页面存档备份,存于)