內部模型
在控制理论的領域中,內部模型(internal model)也稱為內模型,是指為了估計系統擾動的影響,而去模擬系統特定輸入下反應的程序。內部模型原則(internal model principle)最早是由控制工程學者弗朗西斯(B. A. Francis)及翁漢(W. M. Wonham)所提出[1],是科南特(Conant)和阿什比(Ashby)提出良好調節器定理的明確描述[2]。良好調節器定理的觀點和經典控制不同,經典控制的反馈迴路無法明確的針對控制系統建模(雖然經典控制器中多半會包括一個隐式的模型)[3][4]。
在生物體的運動控制中,其內部模型原則是指運動控制是由受控體及控制器的交互影響所控制。受控體是被控制的身體部位,內部模型本身就是控制器中的一部份,來自控制器的資訊(例如來自中樞神經系統、回授資訊及感知副本等)會送到受控體,受控體再依資訊動作。
內部模型可以用前饋控制或是回授控制的方式來進行控制。前饋控制會用目前狀態以及系統模型計算輸入給系統,不會使用回饋,因此無法修正其控制的誤差。在回授控制中,會將系統的部份輸出回授給系統,因此系統可以根據實際輸出及理想輸出的誤差進行調整或是補償。目前已提出二類的內部模型:前向模型(forward model)以及逆模型(inverse model)。在模擬時,可以結合這二類的內部模型來處理複雜的運動任務。
前向模型
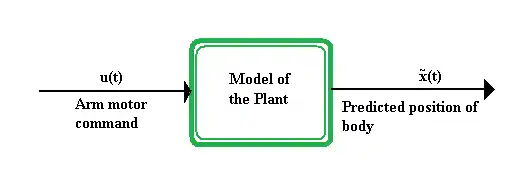
最簡單型式的前向模型,以給受控體(此處為身體)的運動命令為其輸入,輸出所預測的身體位置。
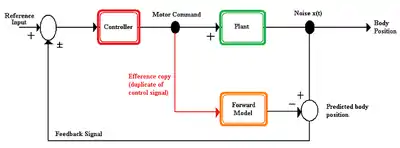
前向模型的運動命令輸入可以是感知副本(如圖1),輸出(所預測的身體位置)會和身體實際的位置比較。身體實際位置和預測位置的差異來自引入系統的雜訊,可能是內在的(例如不完美的身體感知,感測器雜訊),也可能是外在的(身體受到未預期的外力)。若身體實際位置和預測位置有差異,誤差會再回饋到整體系統,因此可以形成新的運動命令,使運動更加精確。
逆模型
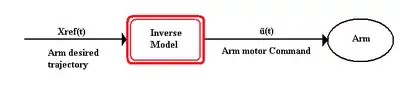
逆模型用身體的理想位置和實際位置為輸入,來估算從目前位置移動到理想位置需要的運動命令。例如,考慮手臂到達特定位置的任務,理想位置(或是理想位置的軌跡)輸入到這個逆模型中,逆模型產生控制手臂到理想位置所需要的運動命令(如圖2)。逆模型和自由度問題及运动协调的不受控流形假說(Uncontrolled manifold hypothesis,UCM hypothesis)有密切關係。
結合前向模型和逆模型
有理論研究提出在運動控制的模式中,若結合逆模型及前向模型,逆模型輸出運動指令的感知副本可以用來作為前向模型的輸入,在後續繼續預測。考慮手臂到達特定位置任務,而且手需抓住物體。手臂運動指令的感知副本可以傳到前向模型,以預測手臂的可能軌跡。根據此資訊,控制器可以產生類似的運動命令,讓手抓住物體。目前已有人提出,若存在上述的機制,結合逆模型及前向模型可以讓中樞神經系統進行想要的動作(讓手臂到達特定位置),精確的到達該位置,而且控制手去抓住物體[5]。
適應控制理論
在假設可以獲取新模型,而且已有的模式可以更新的情形下,感知副本對於移動任務的適應控制非常重要。在移動任務的過程中,會將感知副本送到一個稱為動態預測(dynamics predictor)的前向模型中,其輸出可以預測運動控制的輸出。若將適應控制的技巧用在運動控制中,感知副本會用在間接控制架構中,作為參考模型的輸入。
科學家
內部模型假說的形成是許多科學家貢獻的結果。迈克尔·乔丹、伊曼紐爾·托多羅夫(Emmanuel Todorov)和 丹尼爾·馬克·沃伯特在數學的形式化上有顯著的貢獻。桑德羅·穆薩-伊瓦爾迪、川人光男(Mitsuo Kawato)、克勞德·蓋茨(Claude Ghez)、雷扎·沙德梅赫爾(Reza Shadmehr)、蘭迪·弗拉納根及康拉德·柯爾丁產出了許多的行為實驗。法蘭克·岡瑟和其同仁所發展的,有關言语产生的DIVA模型,就結合了前向模型和逆模型,用模擬語音發音器(speech articulators)來產生聽覺軌跡(auditory trajectories)。有二個受人關注的言语产生逆模型[6]是由Iaroslav Blagouchine和Eric Moreau所發展的[7]。二個模型都結合了最佳原則以及平衡點假說(運動命令λ作為內空間的坐標)。其輸入運動命令λ可以由在使內空間的路徑最小化而得,可能是在聲學約束下(第一個模型)或是在聲學及力學約束下(第一個模型)。聲學約束和產生聲音的質有關(以共振峰的方式量測),而力學約束是和舌頭本身的剛度有關。第一個模型(其中的剛度是不受控的)符合自由度問題中描述的標準UCM(不受控流形)假說。相反的,有規範剛度的第二個最佳化內部模型,顯示了(至少在合理的剛度範圍內)語言的良好可變性,符合运动协调中提出,較新的UCM假說版本。也有許多有關內部模型的臨床文獻,例如約翰·克拉庫爾[8]、 彼得羅·馬佐尼(Pietro Mazzoni)、毛里斯·史密斯(Maurice A. Smith)、Kurt Thoroughman、Joern Diedrichsen及艾美·巴斯蒂安等人的著作。
參考資料
- B. A. Francis and W. M. Wonham, "The internal model principle of control theory (页面存档备份,存于)", Automatica 12 (1976) 457–465.
- Roger C. Conant and W. Ross Ashby, "Every good regulator of a system must be a model of that system (页面存档备份,存于)", International Journal of Systems Science vol 1 (1970), 89–97.
- Jan Swevers, "Internal model control (IMC) (页面存档备份,存于)", 2006
- Perry Y. Li, "Internal Model Principle and Repetitive Control (页面存档备份,存于)"
- Kawato, M. . Current Opinion in Neurobiology. 1999, 9 (6): 718–727. PMID 10607637. doi:10.1016/S0959-4388(99)00028-8.
- 也包括模擬語音發音器,例如生物力學舌模型(biomechanical tongue models、BTM)
- . [2018-09-03]. (原始内容存档于2015-03-08).
- "Sensory Prediction Errors Drive Cerebellum-Dependent Adaptation of Reaching" (页面存档备份,存于), Tseng, Diedrichsen, Krakauer, et al., Journal of Neurophysiology, 98:54-62, May 16, 2007