多波束測深探測儀
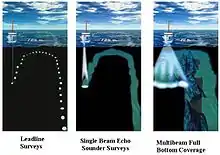
多波束測深探測儀(,縮寫:MBES),是一種應用多個聲波發射出去,至海床或障礙物後反射回來,探測儀可以接收到訊號,依據收到的時間,進而算出聲波所行走的距離。因為為多個聲波一齊發出,成一扇面狀,故較單音束測深探測儀附蓋得更多,效率佳,為現今普遍測深的重要儀器。
.jpg.webp)
歷史和發展

為避免再次發生1912年鐵達尼號的災禍,德國物理學家亞歷山大·伯姆引導一些研究,找出了一個發現冰山的方法。他發現回聲的技術,可惜對於認出冰山的效能不太理想,卻是一種非常好的工具用來深測海洋的深度。Behm 於1913年得到發明的專利權。
探測儀的起源,要從海岸調查說起。1807年,Ferdinand Rudolph Hassler帶領著一群數學家、製圖員、大地測量師、氣象學家等等專業人員共同調查及繪出美國海岸。而第一個正式的水文調查在1839年,美國繪出了第一個航海圖。最初的測量法為用繩子牽引一小石子做測量,在各點施測,看繩子上的刻度得值。在1930年代出現了第一個用聲納測量深度的儀器「Dorsey Fathometer」,為單音束測深機,1950年代後持續發展出多音束的測深機,即為多波束測深探測儀。
運作原理
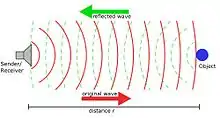
回音測深術,又稱回聲,是一種使用聲音的脈衝波技術,從表面或潛艇直接向下垂直,依靠聲波來測量到達底部的距離。基本原理為用聲速傳播的時間,與聲音在水中傳播的速度相乘,其值即為距離。距離的測量方法是在水中用單外出脈衝波,往來半倍的時間,大約每秒1.5個公里。回聲是一種特別有效的聲納應用,目的是確定底部地點或範圍。若多波束的情況,還需要考慮各個波束的角度,經修正後而得。
- Singlebeam:

coverage = onebeam
- Multi-beam:

coverage = swath
修正
在海上做測深,有許多誤差需要做修正,以下列出幾種誤差:
- Roll(晃動)
- Pitch(傾角)
- Gyro(羅盤)
- Azimuthalmisalignment(垂直方位)
- Time delay(時間延遲)
- Dynamic draught(吃水)
- Echo-sounder instrumental errors(儀器)
- Water column(水層)
應用

多波束測深探測儀為在海上作業中最基本的測深儀器,目的為測量海床的深度,常應用在地質調查及工程建設中,而在不同的深度範圍,又會用不同能量及束寬的波來測量,以維持資料品質,故在不同深度會用不同的測深機。
参考资料
- A Note on Fifty Years of Multi-beam
- 宋國士教授測深課程講義
- Louay M.A. Jalloul and Sam. P. Alex, "Evaluation Methodology and Performance of an IEEE 802.16e System", Presented to the IEEE Communications and Signal Processing Society, Orange County Joint Chapter (ComSig), December 7, 2006. Available at: https://web.archive.org/web/20110414143801/http://chapters.comsoc.org/comsig/meet.html
- B. D. V. Veen and K. M. Buckley. Beamforming: A versatile approach to spatial filtering. IEEE ASSP Magazine, pages 4–24, Apr. 1988.
- H. L. Van Trees, Optimum Array Processing, Wiley, NY, 2002.
- "A Primer on Digital Beamforming" by Toby Haynes, March 26, 1998
- "What Is Beamforming?" by Greg Allen.
- "Two Decades of Array Signal Processing Research" by Hamid Krim and Mats Viberg in IEEE Signal Processing Magazine, July 1996