步進馬達
步進馬達(英語:、)是直流無刷電動機的一種,為具有如齒輪狀突起(小齒)相鍥合的定子和轉子,可藉由切換流向定子線圈中的電流,以一定角度逐步轉動的馬達。
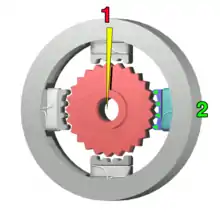
步進馬達步級角構造,黃色部分為每次脈沖行走量
步進馬達的特徵是採用開迴路控制(Open-loop control)處理,不需要運轉量传感器(sensor)或編碼器,且切換電流觸發器的是脈衝信號,不需要位置檢出和速度檢出的回授裝置,所以步進電機可正確地依比例隨脈沖信號而轉動,因此達成精確的位置和速度控制,且穩定性佳。
歷史
1923年,James Weir French發明三相可變磁阻型(Variable reluctance),此為步進馬達前身。
構造
- 永久磁鐵型(permanent magnet type)
- 可變磁阻型(variable reluctance type)
- 複合型(hybrid type)
系統組合
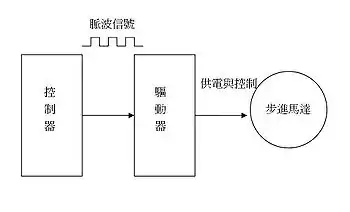
步進馬達的基本構成
主要特徵
步進馬達只需要通過脈波信號的操作,即可簡單實現高精度的定位,並使工作物在目標位置高精度地停止。步進馬達是以基本步級角的角度為單位來進行定位。以5相步進馬達為例,其基本步級角為0.72,因此可以將馬達轉1圈分為500等分(=360度 / 0.72),以此方式來細分每次行進量做為定位基準。
间歇动作是步进器输出的最佳方式。当应用需要电动机不间断运行时,步进电机会降低效率和扭矩。从成本的角度来看,步进电机通常比伺服电机便宜得多。[1]
選用特點
在步進馬達的選用上必須注意以下幾點:
- 步進角:亦即步進馬達之解析度(此指1脈波的移動量),步進馬達的步進角就是依馬達旋轉一圈(360°)而分割成多少來決定。
- 轉動速度:亦即脈波輸入速度(pulse/s)。
- 轉矩:選擇步進馬達時,需以有負荷時之最大轉矩(kg-m)的1.5倍~2倍來決定。
- 負荷慣性慣量:依據使用場合計算負荷慣性慣量,再依步進馬達規格表,選擇容許負載慣性慣量需大於計算值之1.3倍以上。
- 驅動器:連結控制器或直接接受外部訊號,進而控制步進馬達動作。驅動器將直接影響步進馬達的性能表現。
- 搭配減速機:使用減速機型步進馬達可達到減速、提高轉矩、提高解析度、降低施加於馬達軸之負荷慣性慣量、改善起動與停止時的阻尼特性,進而降低運轉之振動。
参考文献
- . 锐特步进电机. 2019-11-04 [2021-12-08]. (原始内容存档于2021-12-08).
外部連結
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.