波德靈敏度積分
波德靈敏度積分(Bode's sensitivity integral)是由亨德里克·韋德·波德所提出的公式,針對線性非時變回授控制系統的一些限制進行量化。回控控制系統會將輸出信號經由感測器回授進入系統,系統設計時,一方面希望實際輸出可以盡量接近理想輸出,另一方面也希望使系統盡量不受外部擾動的影響(降低系統對擾動靈敏度)。波德靈敏度積分是針對系統對擾動靈敏度進行量化。
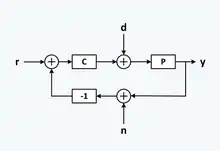
回授控制的方塊圖
圖中P是一個動態過程,傳遞函數是P(s)。控制器C的傳遞函數是C(s)。控制器設法讓過程輸出y追隨參數輸入r,但因為干擾d以及量測誤差n的存在,會讓輸出出現未預期的變化。
令L為迴路传递函数,也是迴路增益,L(s) = P(s)C(s),而S為靈敏度函數,再針算靈敏度函數對數值對所有頻率下的積分,則下式會成立:

其中為L在右半平面的極點(不穩定的極點)。

若L的极点比零点多二個或是二個以上,且沒有位在右半平面极点(所有極點都穩定),上式可以簡化為:

靈敏度越低越好,但由波德靈敏度積分可以看出,若在某一個頻率段降低擾動的靈敏度,因為波德靈敏度積分為定值,因此一定會有某一個頻率段的擾動靈敏度會因此而上昇,這稱為「水床效應」(waterbed effect)[1]。因此無法針對所有頻段降低系統靈敏度。
參考資料
- (PDF). [2017-04-25]. (原始内容存档 (PDF)于2016-03-05).
延伸閱讀
- Karl Johan Åström and Richard M. Murray. Feedback Systems: An Introduction for Scientists and Engineers. Chapter 11 - Frequency Domain Design. Princeton University Press, 2008. http://www.cds.caltech.edu/~murray/amwiki/Frequency_Domain_Design (页面存档备份,存于)
- Stein, G. . IEEE Control Systems Magazine. 2003, 23 (4): 12–25. ISSN 1066-033X. doi:10.1109/MCS.2003.1213600.
- Costa-Castelló, Ramon; Dormido, Sebastián. . IFAC-PapersOnLine. 2015, 48 (29): 259–264. ISSN 2405-8963. doi:10.1016/j.ifacol.2015.11.246
 .
.
外部連結
- Use of Bode's Integral Theorem (circa 1945) - NASA publication.
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.