自适应控制
自适应控制(Adaptive control)也稱為適應控制,是一种对系统参数的变化具有适应能力的控制方法。在一些系统中,系统的参数具有较大的不确定性,并可能在系统运行期间发生较大改变。比如说,客机在作越洋飞行时,随着时间的流逝,其重量和重心会由于燃油的消耗而发生改变。虽然传统控制方法(即基于时不变假设Non-Time-Variant Assumption的控制方法)具有一定的对抗系统参数变化的能力,但是当系统参数发生较大变化时,传统控制方法的性能就会出现显著的下降,甚至产发散。
需要注意区别的是,虽然同样是为对抗系统参数的不确定性和时变性而设计的,自适应控制与鲁棒控制有着本质区别。鲁棒控制是采用过大的控制量来保证受控对象的状态向收敛方向移动。其优点是,只要参数的改变程度处在控制器的设计范围之内,系统就能保持稳定。而缺点在于,过大的控制量会导致系统发生“抖动”(Chattering),从而导致系统跟踪精度有限或驱动机构磨损加剧。而自适应控制则是通过逐步逼近系统特性来保证跟踪精度,其缺点是,在开始阶段不一定能保证稳定,而且往往需要运行一段时间才能实现精确跟踪输入量。其优点是在正常运行时系统可以比较平稳地实现精确跟踪。
主要分類
自适应控制通常可以分为两种类型,一种叫做直接自适应控制(Direct Adptive Control),另一种叫做间接自适应控制(Indirect Adaptive Control)。
直接自适应控制
实际系统中一般采用直接自适应控制方法。直接自适应控制直接对控制器的参数进行在线调整[1],其目的是使得系统的跟踪误差趋于零。通过简单的Lyapunov稳定性推导,可以得到直接自适应控制的控制律。而通过充分利用实际系统的时延,可以运用上一采样时刻的参数值更新控制律,从而大大减小了直接自适应控制的在线计算量。
间接自适应控制
间接自适应控制是通过对系统模型某个或某些未知参数进行在线估计,然后将这些参数的最新估计值代入并更新所设计的控制器的增益[1]。间接自适应控制的目的是使得该参数的估计误差趋于零。所以,间接自适应控制一般要求对系统模型结构有清晰的了解。然而要想获得实际系统的精确模型几乎是不可能的。
相关方法
其他分類方式
双重自适应控制
双重自适应控制是以對偶控制理論為基礎,理論上可以設計最佳的對偶控制器,但是在實務上會有困難,一般實務上會設計亞最佳(Suboptimal)的對偶控制器。
非双重的自适应控制
非双重的自适应控制有适应性极点配置(Adaptive Pole Placement)、極值搜尋控制器(AExtremum Seeking Controllers)、重複學習控制器及增益規劃等作法。像模型參考自適應控制及模型識別自適應控制也屬於非双重的自适应控制。
模型參考自適應控制
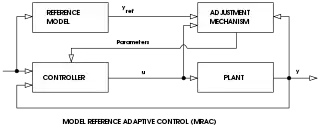
模型參考自適應控制(Model Reference Adaptive Controllers)簡稱MRAC,其中包括一個定義理想閉迴路特性的「參考模型」,自適應機制再利用參考模型的輸出來調整控制器的參數。
模型參考自適應控制可以分為梯度最佳化的MRAC或是穩定性最佳化的MRAC,前者會在特性和參考模型不同時,用一些局部的法則來調整參數。
模型識別自適應控制
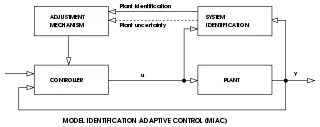
模型識別自適應控制(Model Identification Adaptive Controllers)簡稱MIAC,是在系統運行時進行系統識別,利用系統識別的結果來調整系統。
模型識別自適應控制可以分為谨慎自适应控制器(Cautious Adaptive Controllers)及確定等效自适应控制器(Certainty Equivalent Adaptive Controllers),前者用目前系統識別的結果來調整控制律,允許系統識別有些不確定性;後者以目前系統識別的結果當作真正的系統,假設系統識別的結果沒有不確定性。
確定等效自适应控制器又可以分為非參數型及參數型的自适应控制器,參數型自适应控制器還可以細分為顯式參數型及隱式參數型的自适应控制器。
應用
在設計自适应控制時,需特別考慮有關收斂及強健性的問題。一般會用李雅普诺夫稳定性來推導控制适应法則,並且證明其收斂。
一般而言,自適應控制的典型應用如下:
- 固定的線性控制器,工作在一操作點下的自調適。
- 固定的線性控制器,工作在所有操作點下的自調適。
- 當程序因老化、漂移或磨損而變化時,針對固定控制器的自調適。
- 線性控制器利用自適應控制來控制一個非線性或是時變的系統。
- 非線性控制器利用自適應控制來控制一個非線性的系統。
- 多變數控制器利用自適應控制或是自調適控制來控制多變數(MIMO)的系統。
一般這些方式會調整系統,符合程序的靜態及動態特性。有些情形下,自适应控制只限制在其靜態特性,因此會有以穩態的特徵曲線或是極值控制進行的自适应控制,目的是要使穩態值最佳化。因此有許多應用自适应控制的方法。
参考文献
- Astrom, Karl. . Dover. 2008: 25–26.
延伸閱讀
- B. Egardt, Stability of Adaptive Controllers. New York: Springer-Verlag, 1979.
- I. D. Landau, Adaptive Control: The Model Reference Approach. New York: Marcel Dekker, 1979.
- P. A. Ioannou and J. Sun, Robust Adaptive Control. Upper Saddle River, NJ: Prentice-Hall, 1996.
- K. S. Narendra and A. M. Annaswamy, Stable Adaptive Systems. Englewood Cliffs, NJ: Prentice Hall, 1989; Dover Publications, 2004.
- S. Sastry and M. Bodson, Adaptive Control: Stability, Convergence and Robustness. Prentice Hall, 1989.
- K. J. Astrom and B. Wittenmark, Adaptive Control. Reading, MA: Addison-Wesley, 1995.
- I. D. Landau, R. Lozano, and M. M’Saad, Adaptive Control. New York, NY: Springer-Verlag, 1998.
- G. Tao, Adaptive Control Design and Analysis. Hoboken, NJ: Wiley-Interscience, 2003.
- P. A. Ioannou and B. Fidan, Adaptive Control Tutorial. SIAM, 2006.
- G. C. Goodwin and K. S. Sin, Adaptive Filtering Prediction and Control. Englewood Cliffs, NJ: Prentice-Hall, 1984.
- M. Krstic, I. Kanellakopoulos, and P. V. Kokotovic, Nonlinear and Adaptive Control Design. Wiley Interscience, 1995.
- P. A. Ioannou and P. V. Kokotovic, Adaptive Systems with Reduced Models. Springer Verlag, 1983.