虛擬導具
虛擬導具(Virtual fixture)或稱為虛擬夾具或虛擬支架,是在使用者對實際環境感知的基礎上,疊加上擴增感測資訊的作法,目的是提昇人們進行任務以及遙控機器人任務下的表現。此技術是在1990年代初期由美国空军研究实验室的路易斯·羅森堡所發展。虛擬導具是虚拟现实及擴增實境的開創性平台。
歷史

虛擬導具最早是由美国空军阿姆斯壯實驗室的路易斯·羅森堡在1992年開發,是第一個架設的沉浸式(immersive)擴增實境系統[1][2][3][4][5][6]。當時的三度繪圖太慢,無法繪製出複雜及空间配準(spatially-registered)的擴增實境,Virtual Fixtures用了二個實體的機器手臂,由用戶穿戴的完整上身外骨骼來控制。為了讓使用戶者有沉浸式的感受,在光學配置上有配置一對對準的雙筒放大鏡,讓使用者看機器手臂的視角類似他看自己手臂的視角[1][7][8][9]。結果是空间配準的沉浸式體驗,使用者移動其手臂時,會看到機器手臂在他手臂應該在的位置。系統也會有電腦生成的虛擬疊加物,像是模擬的實體屏障、區域以及指引,目的是為了協助使用者處理在實際空間中的任務[10][11]。
虛擬導具的费茨法则性能測試是在一系列人體測試物件上進行的。這是第一次證明,透過提供給使用者沉浸式的擴增實境疊加物,可以顯著提昇人類在真實世界中處理靈巧事物的能力[12][13]
概念

虛擬導具的概念最早是由羅森堡在1992年所提出[1],是為了提昇人們在工作場合的直接任務以及遠端遙控任務的效能,所增加的虛擬感知資訊。虛擬感知資訊可以顯示成物理實體的結構上,在空間上配準,讓使用者 感知上可以將虛擬感測資訊視為是實際工作環境的一部份。虛擬感知疊加也可抽象化,具有一些實際物理結構沒有的特質。這種感知疊加的概念很難視覺化,也不容易討論,因此出現了虛擬導具(virtual fixture)的名詞。為了要說明虛擬導具,常常類比為實體世界中的尺。要徒手在紙上畫出筆直線條,對大多數的人而言很難作的又準確又快速。但是若有尺作為輔助,人們就可以快速且準確的畫出筆直線條。尺的作用是輔助繪圖者的筆,可以沿著尺畫出直線,減少繪圖者的手部抖動以及精神負荷,進而提昇結果的品質。
羅森堡對虛擬導具的定義[1][7][10]遠比導引終端致動器的範圍要廣。例如聲音的虛擬導具可以用聲音提供有關終端致動器的位置資訊,提昇使用者的覺察能力。羅森堡認為成功的虛擬導具不只是使用者被虛擬導具引導而已,而是使用者在遠端工作環境有更像是在現場的體驗。不過,在探討人機協作系統時,常用「虛擬導具」一詞來敘述和任務相關的虛擬輔助,重疊在實體環境上,指引使用者在工作區域往預期的方式移動,並且避免使用者往不希望進入的方式移動。以下有些針對這類虛擬導具的敘述。
虛擬導具可以是「導引式虛擬導具」(guiding virtual fixtures)或「禁入區虛擬導具」(forbidden regions virtual fixtures)。例如要遙控車輛到特定位置執行任務,但是在附近區域中不能進入的坑洞,即可將包括坑洞在內的區域畫成禁入區,讓操作者不會將車輛遙控到禁入區內。
不過就算設立了禁入區,操作者的操作仍可能有誤入禁入區的情形,原因可能包括远程操作回路的時間延遲,遙控呈現的效果不佳,或是有其他因素的影響。
導引式虛擬導具的目的是使設備往「建議方向」移動,並且限制設備往「不建議方向」的移動。
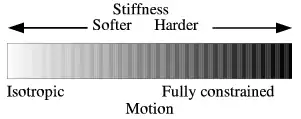
不論是「導引式虛擬導具」或「禁入區虛擬導具」,都可以調整導具的剛性(stiffness),若導具剛性越高,則導具是比較「硬」的,相反的,若導具剛性越低,則導具是比較「軟」的。
參考資料
- L. B. Rosenberg. The Use of Virtual Fixtures As Perceptual Overlays to Enhance Operator Performance in Remote Environments. Technical Report AL-TR-0089, USAF Armstrong Laboratory, Wright-Patterson AFB OH, 1992.
- Rosenberg, L.B. . Proceedings of IEEE Virtual Reality Annual International Symposium (IEEE). 1993: 76–82 [2019-11-23]. ISBN 978-0780313637. doi:10.1109/vrais.1993.380795. (原始内容存档于2021-02-25) (美国英语).
- Rosenberg, Louis. .
- Rosenberg, Louis. .
- Noer, Michael. . 福布斯. 1998-09-21 [22 April 2014]. (原始内容存档于2019-11-23).
- Rosenberg, Louis. . (原始内容存档于2021-03-08).
- Rosenberg, L., "Virtual fixtures as tools to enhance operator performance in telepresence environments," SPIE Manipulator Technology, 1993.
- Rosenberg, Louis B. (PDF). March 1993.
- . (原始内容存档于2019-07-10).
- Rosenberg, "Virtual Haptic Overlays Enhance Performance in Telepresence Tasks," Dept. of Mech. Eng., Stanford Univ., 1994.
- Rosenberg, Louis B. . Virtual Reality Annual International Symposium, 1993. (Seattle, WA: IEEE). 18–22 Sep 1993: 76–82. ISBN 978-0-7803-1363-7. doi:10.1109/VRAIS.1993.380795.
- Rosenberg, Louis. (PDF). March 1993.
- Rosenberg, Louis B. . Telemanipulator Technology and Space Telerobotics. 1993, 2057: 10–21. doi:10.1117/12.164901.
- L. B. Rosenberg. Virtual fixtures: Perceptual tools for telerobotic manipulation, In Proc. of the IEEE Annual Int. Symposium on Virtual Reality, pp. 76–82, 1993.
- P. Marayong, M. Li, A. M. Okamura, and G. D. Hager. Spatial Motion Constraints: Theory and Demonstrations for Robot Guidance Using Virtual Fixtures, In Proc. of the IEEE Int. Conf. on Robotics and Automation, pp. 1270–1275, 2003.