鎖相迴路範圍
hold-in範圍、捕獲範圍(pull-in range,也稱為識別範圍,acquisition range)及鎖定範圍(lock-in range)是鎖相迴路電路有關其頻率偏差範圍的相關參數,是在不同條件下電路可以鎖定外來訊號的資訊。
歷史
在1996年锁相环的參考書中[1][2],會介紹像hold-in、pull-in、lock-in等锁相环可以鎖定的頻率範圍,以及其他锁相环相關的頻率範圍。這些參數廣為在相關產業使用(例如當代的工業文獻[3][4]以及其他的出版物)。在工程文獻中只會對這些參數給予不嚴謹的定義。 這樣的情形多年之後,在有關同步以及通訊的教科書已有共識,在使用這些參數前小心的提供其定義[5]。之後就出現了嚴謹的數學定義[6][7]。
加德納有關鎖定範圍定義的問題
佛洛依德·加德納在其著名著作Phaselock Techniques的第一版,有提到鎖定(lock-in)頻率的概念[8]「假如,因為一些原因,輸入和VCO的頻率差小於迴路頻寬,迴路會幾乎瞬間鎖定,不會脫步(slipping cycle)。可以快速識別頻率的最大頻率差稱為鎖定頻率」。其中有關鎖定頻率以及對應鎖定頻率的定義非常流行,出現在許多的工程文獻上。不過因為在初始狀態時,可能完全沒有頻率差,因此鎖相迴路一開始運作,在識別頻率的過程其實就脫步了。因此在迴路是否脫步的分析中,鎖相迴路的初始狀態就非常重要了。Gardner有關鎖定頻率的概念不太嚴謹,仍需要澄清。
加德納在該書的第二版中有提到:「沒有一個自然的方式可以精確定義唯一的鎖定頻率」,另外也提到:「雖然在本質上很含糊,但鎖定範圍是很有用的概念。」[9][10]。
定義
- ,是輸入(參考)信號和振盪器(VCO, NCO)信號的相位差。
- ,是輸入信號和VCO信號的初始相位差
- ,是輸入信號和VCO信號的頻率差。
- 是輸入信號頻率和VCO游走頻率(free running frequency)信號的差值。




一般而言,,因為 會依VCO的初始輸入而定。


鎖定狀態
鎖定狀態的定義
在鎖定狀態(locked state)中
- 相位誤差擾動很小,頻率誤差很小。
- 在小幅的相位擾動以及濾波狀態後,PLL可以回到鎖定狀態。
Hold-in範圍
Hold-in範圍的定義


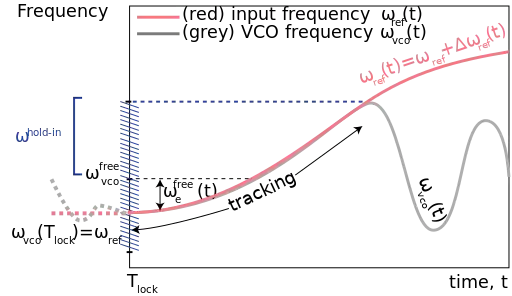
若鎖相環在濾波器狀態、VCO和輸入信號頻率和相位的小擾動後,重新進入鎖定狀態,此時的頻率偏差屬於鎖定狀態。此效果稱為穩態穩定性。此外,針對hold-in範圍內的頻率偏差,輸入頻率若小幅改變,鎖相迴路可以重新達到新的鎖定狀態(追蹤過程)。
捕獲範圍
捕獲範圍(Pull-in range)也稱為是識別範圍(acquisition range)、捕捉範圍(capture range)[11]。
假設鎖相迴路的電源一開始關閉,在時開啟。假設初始的頻率差夠大,迴路在一個周期內無法鎖定,但VCO頻率會慢慢的朝向參考頻率移動(識別過程)。此效果稱為暫態穩定性。捕獲範圍(Pull-in range)用來說明識別過程可以穩定的頻率偏差範圍(在Gardner (1966, p. 40)和Best (2007, p. 61)中有說明)。

捕獲範圍定義
捕獲範圍是在任意相位、初始頻率以及濾波器狀態下,讓PLL可以鎖相捕獲的最大頻率偏差範圍的值,而稱為捕獲頻率(pull-in frequency)[6][7]。








參考資料
- Gardner, Floyd. . New York: John Wiley & Sons. 1966.
- Viterbi, A. . New York: McGraw-Hill. 1966.
- Gardner, Floyd. 3rd. Wiley. 2005.
- Best, Roland. 6th. McGraw-Hill. 2007.
- Kihara, M.; Ono, S.; Eskelinen, P. . Artech House. 2002: 49.
- Leonov, G. A.; Kuznetsov, N. V.; Yuldashev, M. V.; Yuldashev, R. V. . IEEE Transactions on Circuits and Systems I: Regular Papers (IEEE). 2015, 62 (10): 2454–2464. S2CID 12292968. arXiv:1505.04262
 . doi:10.1109/TCSI.2015.2476295.
. doi:10.1109/TCSI.2015.2476295. - Kuznetsov, N. V.; Leonov, G. A.; Yuldashev, M. V.; Yuldashev, R. V. . IFAC-PapersOnLine. 2015, 48 (11): 710–713. doi:10.1016/j.ifacol.2015.09.272 .
- Gardner 1966,第40頁
- Gardner, Floyd. 2nd. New York: John Wiley & Sons. 1979: 70.
- see also Gardner 2005,第187–188頁
- Razavi, B. . IEEE Press. 1996.
- Kuznetsov, N.V.; Leonov, G.A.; Yuldashev, M.V.; Yuldashev, R.V. . Communications in Nonlinear Science and Numerical Simulation. 2017, 51: 39–49. Bibcode:2017CNSNS..51...39K. doi:10.1016/j.cnsns.2017.03.010.
- Best, R.; Kuznetsov, N.V.; Leonov, G.A.; Yuldashev, M.V.; Yuldashev, R.V. . IFAC Annual Reviews in Control. 2016, 42: 27–49. S2CID 10703739. doi:10.1016/j.arcontrol.2016.08.003.
- Kuznetsov, N.V.; Lobachev, M.V.; Yuldashev, M.V.; Yuldashev, R.V. . Doklady Mathematics. 2019, 100 (3): 568–570. doi:10.1134/S1064562419060218.
- Stensby, J. . Taylor & Francis. 1997.