RepRap
RepRap是一種三维打印机原型机(或3D立体打印机),它具有一定程度的自我复制能力,能够打印出大部分其自身的(塑料)组件[1] 。RepRap是(replicating rapid prototyper)的缩写。

作为一个开放设计,这项目中所有的设计都在自由软件协议GNU通用公共许可证(GPL)之下发布[2]。
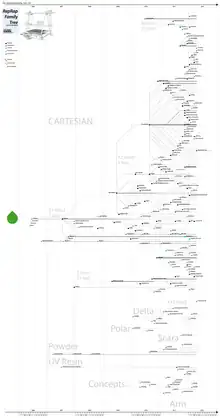
至目前为止,RepRap项目已经发布了四个版本的3D立体打印机:2007年3月发布的“达尔文”(Darwin),2009年10月发布“孟德尔”(Mendel),并在2010年发布的“Prusa Mendel”,和“赫胥黎”(Huxley)。开发者采用了著名生物学家们的名字来命名,是因为“RepRap就是复制和进化”。[3]
由于机器具有制造一些自己零件的能力,作者设想了廉价RepRap装置的可能性,能够制造复杂的产品而不需要广泛的工业基础设施[4][5][6]。他们企图在RepRap中演示这个进化过程,以及它的数量可以按指数成倍增长[1][7]。一项初步研究表明,使用RepRaps打印普通产品可节省经济费用[8] 。
历史

2005年,RepRap项目由英国巴斯大學机械工程高级讲师Adrian Bowyer博士创立。
2005年3月23日,RepRap的博客开始。
2005年夏季,英国工程和物理科学研究理事会提供资金给在英国巴斯大学的初步发展RepRap。
2006年9月13日,RepRap 0.2原型机成功打印了自身的一部分,并用来替换原先用商业3D打印机制作的部分。
2008年2月9日,RepRap 1.0“达尔文”,成功地实现了至少超过一半的快速原型部件的一个实例。
2008年4月4日,可能是最早的由一个RepRap制作的最终用户项目是:一个夹具,它能牢固地把iPod固定在福特Fiesta车的仪表盘上。
2008年5月29日,在几分钟之内被组装,在英国巴斯大学的第一个完成的“儿子辈”的机器制作了“孙子辈”机器的的第一部分。
2008年9月23日,据报道,至少有100拷贝已经在不同的国家建造。当时流传的RepRap确切数量是未知的。
2008年11月30日,首次有记载的“野生”复制发生。复制是由Wade Bortz完成,他是在开发团队之外的制造了一套完整的复制品的其他用户中的第一个用户。
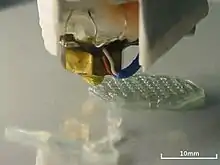
2009年4月20日,公布一个RepRap制作第一块电子电路板。它使用自动化控制系统和一个交换头系统,可以能够打印既有塑料又有导电性的焊料。后来,此部件被整合到制造它的RepRap里。
2009年10月2日,第二代型号设计,被称为“孟德尔”,打印出它的第一部分。"孟德尔"的形状酷似一个三棱镜,而不是一个立方体。
2009年10月13日,RepRap 2.0版“孟德尔”完成。
2010年1月27日,Foresight Institute公布的“Kartik M. Gada人道主义创新奖”奖励给一种改进的RepRap的设计和实现。有两个奖项,其中一个$20,000,另一个为$80,000。[9]奖金的行政部门后来被转移到Humanity+。[10]
2010年8月31日,第三代型号的设计上,“赫胥黎”被正式命名。其开发是基于"孟德尔"的硬件与原来的打印量的30%的小型化版本。
2012年上半年,RepRaps和RepStraps的建造和使用在科技工具和工程社区内广为流传。RepRaps及其商业衍生产版本已经出现在许多主流媒体,并且进入了科技媒体例如《连线杂志》(Wired)和一些有影响力的工程专业人士的新闻媒体上的永久观察名单和报道主题。
2012年夏天/秋天,已经有很多集中在较小的新公司销售的衍生版本,工具包和组装好的系统,还有新的开发研究的结果,使得和现有工业提供的三维打印价格相比能大幅度降低3D打印的价格。RepRap研究结果也许是最引人注目的是第一个成功的Delta设计,Rostock打印机,在缓慢的日趋成熟,有了一个初步的尝试自行采购的一些经验建设者的工作解决方案。虽然Rostock仍然处于实验阶段的重大修改,但是它几乎每月都在接近最好的和很不同的设计。最新的一代设计使用OpenBeams,用线(典型的例如Dyneema或Spectra渔线)代替导带等等,这也代表了一些在RepRaps的最新发展趋势。
2016年1月,2016年1月初RepRapPro(RepRap专业版的缩写,英国RepRap项目的一个商业项目)宣布将于2016年1月15日停止交易。原因是低成本3D打印机市场的挤压, 和无法在该市场上扩张。 RepRapPro中国继续经营[11]。
硬件
作为一个开放源码项目,旨在鼓励演化,有许多衍生版本存在,并它们的设计师是自由的进行修改和替换。作為開源項目,設計人員可以自由進行修改和替換,但是他們必須重新分享他們的改進。
设计
有許多RepRap打印機設計包括:
 Prusa i3
Prusa i3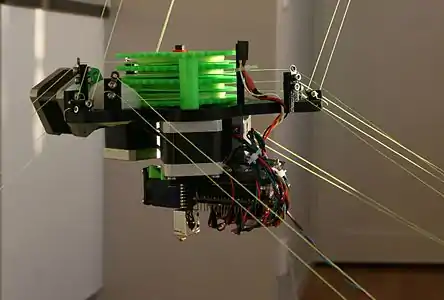 Hangprinter
Hangprinter RepRap Fisher
RepRap Fisher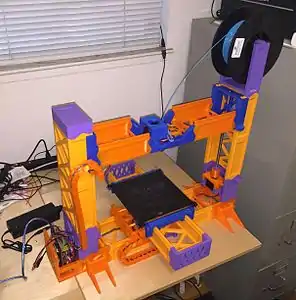 RepRap Snappy
RepRap Snappy RepRap Morgan
RepRap Morgan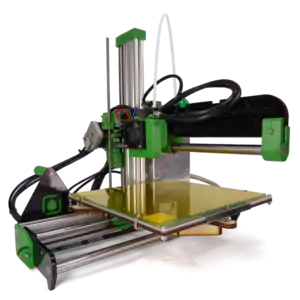 RepRap Ormerod
RepRap Ormerod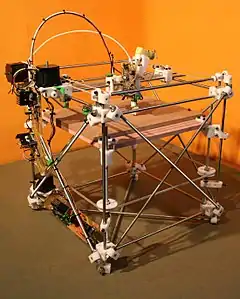 RepRap达尔文
RepRap达尔文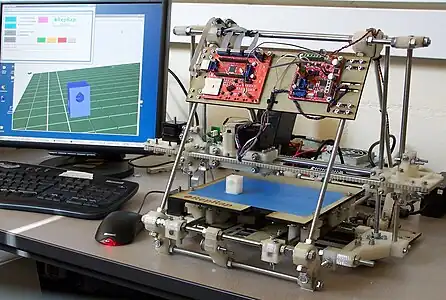 RepRap孟德尔2.0版本
RepRap孟德尔2.0版本
RepRap三维打印机的热塑性挤出机一般由安装在一个计算机控制的笛卡爾坐標系的XYZ平台。该平台是由金屬結構物与打印出的塑料连接部件建造。所有三个轴是被步进电机所驱动,在X轴和Y轴是通过一个時規皮带(timing belt),Z轴則是透過螺桿帶動(leadscrew)。
RepRap的核心部件是热塑性塑料挤出總成。早期的RepRap挤出机采用直流減速馬達驱动的螺丝紧紧地压塑料丝原料,迫使它经过加热熔化室,通过一个狭窄的挤压喷嘴。然而,由于直流減速馬達擁有較大的慣性,使其難以快速的启动或停止,進而造成擠出量無法做精確的控制。因此,在最新的塑膠挤出總成上,則是採用了步进馬達(直驅或減速)驱动原料丝,夾持原料丝的結構則修改為摩擦滾輪(軸)和一个球轴承。[12]
RepRap的电子产品是基于流行的开放源码的Arduino的平台,与其它用于控制步进电机的驅動器。当前版本的电子产品使用的Arduino的衍生Sanguino的主板,和一个另外的和定制的Arduino板做的挤出總成控制器。这种架构可以扩展额外的挤出總成,各自帶有自己專屬的控制器。
主要修订版
第一个公开发布的RepRap,"达尔文",是一个XY龙门式移动在Z轴打印床之上的型号。
"孟德尔"用球轴承取代"达尔文"的滑动轴承,减少了摩擦和容忍误差。 孟德尔型号的打印范围大小为200 mm(宽)×200 mm(深)×140毫米(高)或8"(宽)×8"(深)×5.5"(高)。[13]
软件
RepRap被视为是一个完整的复制系统,而不是简单的一块硬件。为此,该系统包括计算机辅助设计(CAD)的3D建模系统和计算机辅助制造(CAM)软件和驱动程序的形式,把RepRap用户的设计转换成一组指令,通过RepRap的硬件,转变成了物理物体。
现在已经有为RepRap开发了两种不同的CAM工具链。首先,简单地题为“RepRap Host”,是RepRap领导开发人员Adrian Bowyer用Java语言编写。第二,“Skeinforge”[14][15],是由Enrique Perez独立编写。两者都是完整的工具链系统,把3D模型转换为命令打印机的机器语言G-code。
后来,像Slic3r,pronterface[16],Cura[17]其他程序被创建。 最近,创建了富兰克林固件( Franklin firmware)[18],允许RepRap 3-D打印机作为通用目的,还可用作三维机器人,除了3D打印(例如铣削,流体处理等)之外[19]。
闭源软件KISSlicer [20]和repetier host[21]也被使用。
几乎任何CAD或3D建模软件可以与RepRap使用,只要它是能够生成STL文件。内容创建者可以使用他们熟悉的任何工具,不管工具是商业的CAD软件,例如SolidWorks,或开源的3D建模软件,例如Blender或OpenSCAD等。
复制材料
RepRaps打印的物体材料是来自与ABS,PLA,和类似热塑性塑料的材料。
PLA聚乳酸具有高刚度,最小的翘曲,和具有一个有吸引力的半透明颜色的工程优势。PLA聚乳酸材料是生物可降解性的和植物来源的环保材料。
RepRap用户不同于大多数商业机器,我们鼓励印刷新材料和新方法进行实验,并公布其结果。用于打印的新材料(如陶瓷)的方法已被开发这种方式。
RepRap项目还没有确定一个合适的载体材料,以补充其印刷过程中。
印刷电子技术是RepRap项目的一个主要目标,因为它将可以打印自己的电路板。已经提出的几种方法是:
- 伍德合金or Field's metal:电路纳入到的部分,因为它是被形成的低熔点金属合金。
- 银填充的聚合物:通常用于电路板的维修,考虑用于导电迹线。
- 直接挤出的焊料[22]
- 导电线:在印刷过程中的可以从线轴铺设到一个部件[23]
建造
其它三维打印机设计(如商业Makerbot),和部分由其他装置(如Meccano)构造可用于引导RepRap建造RepRap零件的过程。许多这样的机器都是基于RepRap设计和使用RepRap电子系统。这些一般被RepRap社区称为名字“RepStrap”(“引导RepRap”)。一个RepStrap是任何开放式硬件的快速成型机,建造RepRap部件,本身是还没有的RepRap下的制造工艺所建造。[24]一些RepStrap设计是和达尔文和孟德尔相似的,但已被修改为由激光切割片材或铣零件[25][26]。其他,如Makerbot,共享与RepRap(尤其是电子)等的一些设计元素,但是Makerbot其机械结构是完全重新设计的。
项目成员
该项目的“核心团队”[27]包括:
目标
RepRap项目的既定目标是建造一个纯粹的自我复制设备,不是为了建造设备本身,而是为了能让用户个人可以在这个星球上的任何地方,以一个最小的资本支出,把桌上台式制造系统技术放在用户个人手中,这将能使用户个人可以制造了许多在日常生活中使用的物品。从理论上讲,该项目试图证明一个假说,那就是用这个技术可以让人们可以使用冯诺依曼通用制造器(英文),来建造出“具有足够的通用性的快速原型设计和直接写技术”。[28]
RepRap自我复制的性质也有利于它像病毒一般的传播,和可能有利于主要产生模式的典範轉移,从一个工厂生产的专利产品的设计到制造的消费产品,很可能变到个人非专利产品的生产与开放的规范。开放的个人产品的设计和制造能力,大大降低了生产周期时间,并支持更大的产品多样性,可支持非工厂生产的规模。[29]
参见
- 三维打印
- Self-replicating_machine(自我复制机器)(页面存档备份,存于)(英文)
- Disruptive technology(破坏性创新技术)(页面存档备份,存于) (英文)
- Open Source Appropriate Technology(页面存档备份,存于) (英文)
- Fab-lab(页面存档备份,存于) (英文)
- MakerBot(页面存档备份,存于) (英文)
- Treatstock
- Thingiverse(页面存档备份,存于) (英文)
- HE3D(页面存档备份,存于) (英文)
参考资料
- Jones, R.; Haufe, P.; Sells, E.; Iravani, P.; Olliver, V.; Palmer, C.; Bowyer, A. . Robotica. 2011, 29 (1): 177–191. doi:10.1017/s026357471000069x.
- . [2017-03-24]. (原始内容存档于2016-01-28).
- . RepRap Wiki. [2010-05-02]. (原始内容存档于2010-06-24).
- J. M Pearce, C. Morris Blair, K. J. Laciak, R. Andrews, A. Nosrat and I. Zelenika-Zovko, "3-D Printing of Open Source Appropriate Technologies for Self-Directed Sustainable Development (页面存档备份,存于)", Journal of Sustainable Development 3(4), pp. 17-29 (2010).
- Pearce, Joshua M. . Science. 2012, 337 (6100): 1303–1304 [2017-03-24]. PMID 22984059. doi:10.1126/science.1228183. (原始内容存档于2015-09-24).
- J.M. Pearce, Open-Source Lab: How to Build Your Own Hardware and Reduce Research Costs, Elsevier, 2014.
- Sells, E., Smith, Z., Bailard, S., Bowyer, A., & Olliver, V. (2009). Reprap: the replicating rapid prototyper: maximizing customizability by breeding the means of production. Handbook of Research in Mass Customization and Personalization.
- Wittbrodt, B.T.; Glover, A.G.; Laureto, J.; Anzalone, G.C.; Oppliger, D.; Irwin, J.L.; Pearce, J.M. . Mechatronics. 2013, 23: 713–726. doi:10.1016/j.mechatronics.2013.06.002.
- . [2011-04-24]. (原始内容存档于2011-08-24).
- . humanity+. [2011-04-25]. (原始内容存档于2012-08-07).
- . 2016-01-06 [2021-02-08]. (原始内容存档于2016-03-17).
- RepRap, RepRap. . RepRap. [2012-08-12]. (原始内容存档于2012-08-05).
- . RepRap. [2010-06-03]. (原始内容存档于2010-06-12).
|chapter=被忽略 (帮助) - . [2012-10-16]. (原始内容存档于2012-11-02).
- . [2012-10-16]. (原始内容存档于2012-07-11).
- . [2017-03-28]. (原始内容存档于2017-02-09).
- . [2017-03-28]. (原始内容存档于2017-03-12).
- Github download https://github.com/mtu-most/franklin (页面存档备份,存于)
- Wijnen, B., Anzalone, G. C., Haselhuhn, A.S., Sanders, P.G., Pearce, J. M. Free and Open-source Control Software for 3-D Motion and Processing. Journal of Open Research Software, 4: e2, DOI:10.5334/jors.78 free access (页面存档备份,存于)
- . [2017-03-28]. (原始内容存档于2017-03-14).
- . [2017-03-28]. (原始内容存档于2017-06-28).
- . RepRap Blog. [2010-05-02]. (原始内容存档于2009-04-21).
- . RepRap Wiki. [2010-05-02]. (原始内容存档于2010-04-13).
- . RepRap Wiki. [2010-10-04]. (原始内容存档于2010-11-29).
- . RepRap Wiki. [2010-05-02]. (原始内容存档于2010-05-17).
- . RepRap Wiki. [2010-05-02]. (原始内容存档于2010-05-17).
- "The Core Team - who we are" (页面存档备份,存于), reprap.org/wiki
- (PDF). [2007-02-19]. (原始内容 (PDF)存档于2012-04-06).
- . RepRap Wiki. [2007-02-15]. (原始内容存档于2007-02-06).
外部链接
| 维基共享资源上的相关多媒体资源:RepRap |
- RepRap Official Website(页面存档备份,存于) (英文)
- RepRap官方网站(页面存档备份,存于)(中文)
- Video of a talk by Adrian Bowyer on RepRap
- RepRap的官方介绍视频@优酷(页面存档备份,存于)
- Make magazine: How to make a Reprap Robot Part 1
- 介绍'Mendel'的视频(页面存档备份,存于)(英文)
- Reprap-Austria - Reprap Supplies for Austria/Europe(页面存档备份,存于) (英文)