运动学
运动学(kinematics)是力学的一门分支,专门描述物体的運動,即物体在空间中的位置随时间的演进而作的改变,完全不考慮作用力或质量等等影响運動的因素。運動学与動力學(dynamics)不同。動力學专门研究造成运动或影响运动的各种因素。動力學綜合運動學與力動學在一起,研究力學系統由於力的作用隨著時間演進而造成的運動。[1][2]
在開始研討經典力學時,很自然地應該先思考各種可能的運動樣式,而暫時不將任何造成運動的因素納入考量。這初步探詢的知識就是運動學的學術領域。
— 愛德蒙·維特克, 質點與剛體分析動力學通論

任何一个物体,像是车子、火箭、星球等等,不论其尺寸大小,假若能够忽略其内部的相对运动,假若其内部的每一部份都是朝相同的方向、以相同的速度移动,那麼,可以简易地将此物体视为質點,将此物体的质心的位置当作質點的位置。在运动学裏,这种質點运动,不论是直線运动或是曲線运动,都是最基本的研究对象。
假若不能忽略物体内部的相对运动,则当解析其运动时,必须先将物体理想化为刚体,即一群彼此之间距离不变的質點。涉及刚体的问题比较困难。刚体可能会进行平移运动、旋转运动或两者的综合。更困难的案例是多刚体系统的運動。在這系统内,几个刚体由機械連桿连结在一起。運動學分析某連桿裝置的可能運動範圍,或反過來,設計滿足預定運動範圍的連桿裝置。起重機或引擎活塞系統都是簡單的運動系統。起重機是一種開運動鏈。活塞系統是四連桿組的一部分。
質點運動學
質點運動學研究關於單獨質點的運動。從這方面得到的知識可以應用於研究質點動力學、一群質點的研究和其它力學領域。按照路徑的彎曲與否,質點運動可以分為直線運動與曲線運動。
位置、參考系
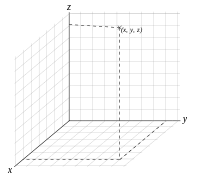
在三維空間裏,詳細設定一個點P的位置需要完成三件事,找到參考點O(通常稱為原點)、給出從點O到點P的距離、給出從點O到點P的直線方向;缺少其中任何資料,都會使得位置的描述不完全。[註 1]
將上述的資料數學化,用向量來描述位置。首先,為了要能夠一致地表示距離或方向,必須選擇一個三維坐標系,設定坐標系的原點O為參考點,以三維坐標系為參考系。這樣,位置向量的大小就是點P離參考點的距離,而位置向量的方向就是從參考點到點P的直線方向。
質點的位置向量是從參考系的原點到質點的位置的向量。這向量表達了從原點到質點位置的距離和方向。在三維空間裏,點P的位置向量 表達為

- ;

其中, 、 、 分別為點P的直角坐標。



位置向量 的大小是點P與原點之間的距離:
- 。

從不同的參考系觀測點P的位置,可以得到不同的位置向量。
靜止與移動
從某參考系觀測,假若質點的位置向量隨著時間的演進而改變,則稱此質點處於「移動狀態」;假若質點的位置向量保持不變,則稱此質點處於「靜止狀態」。請注意,不論是移動狀態或是靜止狀態,都依賴選擇的參考系而定。對於某參考系,處於靜止狀態的質點,對於另一個參考系,可能處於移動狀態。所以,移動狀態或靜止狀態都不是絕對的,都跟選擇的參考系有關。例如,假設在一輛移動中的火車內部有一位乘客。相對於火車,這乘客處於靜止狀態;但相對於火車外面的山嶺,這乘客處於移動狀態。
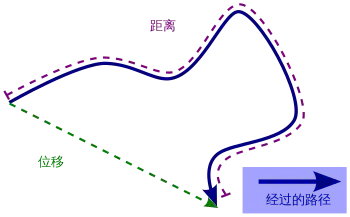
路徑、路徑距離、位移
一個質點的移動「路徑」是從初始點移動到終極點所經過的軌跡。假設這初始點就是終結點,而移動時,其它每一個經過的點都只經過一次,則稱此路徑為「閉合迴路」。
路徑的樣子與參考系的選擇有關。對於某參考系,路徑可能是直線;對於另一個參考系,同樣的路徑可能是曲線。
位移向量表達兩點之間位置的向量差。它可以表達一個質點在某時間間隔內由於運動而造成的位置改變。假設,點P的位置為 ,點Q的位置為 ,則從點Q到點P的位移 為



- 。

位移向量的大小是點P與點Q之間的最短距離。位移向量與位置向量不同,位移向量不會因為選擇不同的參考系而改變。但是,在相對論裏,假設兩個參考系的相對速度不為零,則分別從這兩個參考系測量得到的位移向量也不相等。 距離是一種純量,表達一個質點從某一位置移動到另外一位置,所經過的路徑的長度。例如,一部跑車從初始點行駛到終結點,一共行駛了10公里距離的路程。但是,假若這路程是個閉合迴路,初始點與終結點相同,則這跑車的最終位移的大小(徑向距離)是0,這跑車最終回到了初始點。
假設質點的位置是時間的函數, ,則從時間 到時間 ,這質點所移動的距離 為




- 。

這方程式應用到一個論據:在一段無窮小時間間隔內,位移的大小等於經過的路徑的長度。這論據類似於幾何論據:曲線的一段無窮小曲弧與對應這曲弧的直弦重疊在一起。
速度、加速度
平均速度是在一段時間間隔內的速度的平均值,以方程式定義為
- ;

其中, 是平均速度, 是質點的位移, 是時間間隔。



由於時間間隔 大於零,平均速度 與位移 同向。
速度是一種向量,表達隨著時間的演進而發生的位移改變。瞬時速度定義為,當 變得越來越小時,平均速度 的極限值。注意到,在這裏, 與 都會趨向於零,但是它們的比例 會趨向於非零極限 :

- 。

以微分形式定義,速度是位移對於時間的導數。由於無窮小位移 正切於實際路徑,速度也正切於實際路徑。

速率 是速度的數值大小,是一種純量:

- 。

一個質點移動所經過的路徑距離是一種單調遞增物理量。因此, 是個非負數,速率是個非負數。

平均加速度是在一段時間間隔內的加速度的平均值,以方程式定義為
- ;

其中, 是平均加速度, 是質點在微小時間間隔 內的微小速度改變。


加速度是一種表達質點移動速度隨著時間的演進而改變的向量。瞬時加速度定義為當 趨向於零時,平均加速度的極限值,以方程式表達,
- 。

以微分形式定義,加速度是速度對於時間的導數。
上述速度和加速度的定義式可以逆反過來,以積分形式表達為
- 、
- ;

![{\displaystyle {\begin{aligned}\mathbf {r} (t)&=\mathbf {r} _{0}+\int _{t_{0}}^{t}\mathbf {v} (t)\ \mathrm {d} t\\&=\mathbf {r} _{0}+\mathbf {v} _{0}t+\int _{t_{0}}^{t}\left[\int _{t_{0}}^{t}\mathbf {a} (t)\mathrm {d} t\right]\ \mathrm {d} t\\\end{aligned}}}](../I/2872d50142876f276ca36fd99ef6d879bdec9ff9.svg)
其中, 是初始時間, 是初始速度, 是初始位置。



相對運動
假設,已知質點P、質點Q對於某參考點G的相對運動,應用向量代數,就可以描述質點P對於質點Q的相對運動。假設,從某參考系觀測,質點P、質點Q、參考點G的位置分別為 、 、 ,則質點P、質點Q對於參考點G的相對位置分別為



- 、
- 。


質點P對於質點Q的相對位置為
- 。

換句話說,質點P對於參考點G的相對位置為
- 。

上述這些位移關係式,通過取時間導數,可以得到速度關係式:
- 。

取時間導數於這些速度關係式,可以得到加速度關係式:
- 。

直线运动
在直线运动中,質點沿着直线移动。如果将一个一维坐标系的坐标轴放在这直线上,那麼,就可以用其坐标来設定位置,从而计算出速度和加速度等等。假设,在时间是 时,質點P的位置是 ;经过 时间间隔后,时间是 ,質點P的位置是 。那麼,位移是 。質點P的平均速度 和瞬时速度 分别为∶





- 、
- 。


質點P的平均加速度 和瞬时加速度 分别为:


- 、
- 。


假設,質點P的位置是時間的函數 ,則其速度、加速度分別為

- 、
- 。


等速直线运动的加速度是零,速度 是常数,位置是
- ;

其中, 是初始位置, 是终结位置。


等加速直线运动的加速度 是常数,位移与速度分別是
- 、
- 、
- 、
- ;




其中, 是初始位置, 是终结位置, 是初始速度, 是终结速度。


实例:等加速直线运动
思考一个向上发射的物体;它将会往上直升,然后又落回到地面;它的軌跡全部都包含於同一条直线。假若认定朝上的方向为正值,那麼,这物体将会体验到 -9.81m/s2的等加速度。这物体的运动是等加速直线运动。
现在,請问几个关于這运动的有趣的问题:这物体会在空中运动多久时间?在它开始往下落以前,它会升到多高?当它碰到地面时,它的最终速度是多少?輸入实际的数值,假设物体的最初速度是 +50 m/s。
它会在空中多久时间? 應用位移公式来計算时间:

因为这物体先飞离开地面,然后又落回到地面,净位移是零:

从这程式,可以求解到两个答案。第一个答案是零;虽然这明显解是正确的答案;但是,它代表的时间间隔是那物体开始移动前的时间间隔。离开地面与回到地面所需要的时间為

在它开始往下落以前,它会飞到多高呢?
当这物体升到最高点的时候,它的速度是零。所以可以應用速度平方公式,
假設以地面为座标系统的原点,那麼,是零。 则是最高高度:

当它碰到地面时,它的最终速度会是多少?
正当这物体从最高点往回落的时候,它的速度是零。因此,可以同样的用速度平方公式。带进 的数质 127.55m:

注意到初始速度与最终速度是等值的。这结果跟能量守恒定律相符合。
曲线运动
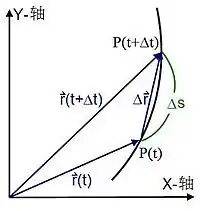
定义質點在空间中沿着曲线的運动为「曲线运动」。曲线运动的位置、速度、加速度等等,皆须用向量来表示。参考右图,假设質點在时间 的位置是 ;在间隔 时间后,位移是 、位置是 ,则質點的速度是


- 。

在 极限得到的速度向量,正切曲线于質點的位置。

定义速率为速度的大小。假设这曲线从 到 的路径长度是 ,则速率为


- 。

假设質點在间隔 时间的速度差是 ,则加速度是
- 。

求解曲线运动问题时,选择合适的坐标系是一项非常重要的步骤。运动所遭遇到的约束、或作用力的几何特性,往往是决定合适坐标的主要因素。假设,限制一粒串珠只能绕圆环移动,那麼,以圆心为顶点,包含串珠与圆环的另一点的角,其角弧可能是合适的坐标。类似地,假设施加於質點的作用力是连心力,則合适的坐标系可能是极坐标系。
直角坐标系
三维空间的直角坐标系有三个坐标轴:x-轴、y-轴、z-轴。采用直角坐标系,位置、速度、加速度表示为
- 、
- 、
- ;



其中, 、 、 分别是質點的位置的三个分量,速度和加速度的三个分量分别为
- ,
- 。


极坐标系
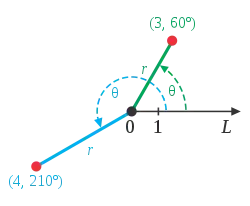


在二维空间裡,极坐标系用半径坐标 、角坐标 来表示質點的位置。半径坐标是極點与質點的直线距离;角坐标是極點与質點的连线对於极轴的角弧。位置、速度、加速度分别表示为


- 、
- 、
- ;



其中, 是半径单位向量, 是角单位向量。


質點的「角位置」就是它的角坐标 ,「角位移」 则是質點在运动时前後角位置的差值,角速度的大小 是角位置對於时间的导数 ,角加速度的大小 是角速度對於时间的导数:




- 。

類似等加速直线运动,假設曲線运动的角加速度 是常数,則角位移与角速度分別是
- 、
- 、
- 、
- ;




其中, 是初始角位置, 是终结角位置, 是初始角速度, 是终结角速度。




实例:等加速曲线运动

如果一个物体不是垂直向上发射,而是与地平面呈 角度射出,那麼,这物体会按照抛物线軌跡移动,它的水平运动与垂直运动可以各自独立计算。假设,这物体是以最初速率 ,与地平面呈 角度射出。



请问在碰到地面以前,它会在空中飞行多远?
垂直方向,这物体会感觉到 加速度;水平方向,不会感觉到有任何加速度。所以,水平位移是


为要解答这问题,必须找到 值。这是可以做到的,只需分析垂直的运动。假设垂直位移为零,用类似前面直线运动的方法来找 值:

现在求解 的表達式,代入原先的水平位移方程式。

二維旋轉參考系
在三維空間內,設定兩個參考系:空間參考系S與旋轉參考系R。空間參考系S的標準正交基為 、 、 。旋轉參考系R的標準正交基為 、 、 。兩個參考系的原點共點。空間參考系S靜止不動,旋轉參考系R繞著固定軸 旋轉。四個單位向量 、 、 、 共平面。這旋轉運動可以簡化為一個二維平面運動。







單位向量的時間變化率
當計算質點的位置、速度、加速度之時,必須特別注意到旋轉參考系R是在持續地旋轉,單位向量 、 也跟著旋轉。在取這些單位向量對於時間的導數時,必須顧慮到旋轉運動。假設 和 以角速度 繞著 旋轉,在初始時間 ,



- 、
- ,


則在時間 ,
- 、
- 。


兩個單位向量 、 對於時間的導數分別為
- 、
- 。


對於含時向量 ,其對於時間的導數為

- 。

設定 、 分別為從空間參考系S、旋轉參考系R觀測到的向量 對於時間的導數,上述方程式可以表達為



- 。

這方程式的叉積項目可以這樣理解:假設向量 的尾部與空間參考系S的原點同點,向量 以角速度 繞著固定軸 旋轉,則向量 的頭部的速度是 。



向量 是任意向量,因此可以將 、 當作算符,這樣,對應的算符方程式的形式為:


- 。












刚体运动学

在物理学裏,理想刚体是一種有限尺寸,可以忽略形变的固体。不论是否感受到外力,在刚体內部,点与点之间的距离都不会改变。根據相對論,這種物體不可能實際存在,但物體通常可以假定為完美剛體,前提是必須滿足運動速度超小於光速的條件。
剛體是由一群數量超多的質點組成。實際而言,不可能精確地追蹤其中每一個質點的運動。為了簡化運算,通常,整個剛體的空間位形可以簡易地以參數設定:
- 剛體的「位置」:挑選剛體內部一點G來代表整個剛體,通常會設定物體的質心或形心為這一點。從空間參考系S觀測,點G的位置就是整個剛體在空間的位置。位置可以應用向量的概念來表示:向量的起點為參考系S的原點,終點為點G。
- 剛體的取向:描述剛體取向的方法有好幾種,包括方向餘弦、歐拉角、四元數等等。這些方法設定一個附體參考系B的取向(相對於空間參考系S)。附體參考系是固定於剛體的參考系。相對於剛體,附體參考系的取向固定不變。由於剛體可能會呈加速度運動,所以附體參考系可能不是慣性參考系。空間參考系是某設定慣性參考系,例如,在觀測飛機的飛行運動時,附著於飛機場控制塔的參考系可以設定為空間參考系,而附著於飛機的參考系則可設定為附體參考系。
歐拉旋轉定理
歐拉旋轉定理表明,在三維空間裏,假設約束剛體內部一點固定不動,則其任意位移等價於繞著某固定軸的一個旋轉,而這固定軸必包含這固定點。換句話說,設定附體參考系B的原點為這固定點,則附體參考系B不會因為這位移而涉及任何平移運動,這位移等價於繞著某固定軸的一個旋轉。[2]
沙勒定理
當剛體移動時,它的位置與取向都可能會隨著時間演進而改變。沙勒定理是歐拉旋轉定理的一個推論。根據沙勒定理,剛體的最廣義位移等價於一個平移加上一個旋轉。[2]因此,剛體運動可分為平移運動與旋轉運動。剛體的現在位置與現在取向可以視為是從某個初始位置與初始取向經過平移與旋轉而成。
如右圖所示,從時間 到時間 ,當剛體在做平移運動時,任意內部兩點,點P與點Q的軌跡(以黑色實線表示)相互平行,線段 (以黑色虛線表示)的方向保持恆定。

挑選剛體內部一點G來代表整個剛體,設定附體參考系B的原點於點G(稱為「基點」),則從空間參考系S觀測,在剛體內部任意一點P的位置 為
- ;

其中, 、 分別是基點G的位置、點P對於基點G的相對位置。

從附體參考系B觀測,剛體內部每一點的位置都固定不變,但從空間參考系S觀測,剛體從時間 到時間 的運動,可以分為基點G從 到 的平移運動,與位移 從時間 到時間 的旋轉運動。


平移速度與角速度
從不同的參考系觀測剛體運動,可能會獲得不同的平移速度和不同的角速度。為了確保測量結果具有實際物理意義,必需先給定參考系。
剛體的平移速度是向量,是其位置向量的時間變化率,是附著於剛體的基點G的速度。對於純平移運動(沒有任何旋轉運動),剛體內部所有點的移動速度相同。假設涉及旋轉運動,則通常剛體內部任意兩點的瞬時速度不相等;只有當它們恰巧處於同一直軸,而這直軸平行於轉動瞬軸,則它們的瞬時速度相等。
角速度也是向量,描述剛體取向改變的角速率,和剛體旋轉時的瞬時轉軸的方向(歐拉旋轉定理保證瞬時轉軸的存在)。在任意時間,剛體內部每一個質點的角速度相同。
向量的時間變化率
假設一剛體呈純旋轉運動,旋轉的角速度為 ,其附體參考系B也會跟著旋轉,因此,對於任意向量 ,從這附體參考系B與從空間參考系S觀測,會得到不同的結果。設定 、 分別為從空間參考系S、附體參考系B觀測到的向量 對於時間的導數,則


- 。

項目 可以想像為,從空間參考系S觀測,剛體內部位置向量為 的質點,由於剛體旋轉而產生的角速度。
向量 是任意向量,因此可以將 、 當作算符,這樣,對應的算符方程式的形式為:

- 。

這算符方程式可以作用於任意含時向量。
運動學方程式
根據沙勒定理,剛體的最廣義位移等價於一個平移加上一個旋轉。[2]挑選剛體內部一點G來代表整個剛體,設定附體參考系B的原點於基點G,則從空間參考系S觀測,在剛體內部任意一點P的位置 為
- ;
其中, 、 分別是基點G的位置、點P對於基點G的相對位置。
點P的速度 為

- ;

其中, 、 分別是基點G的速度、點P對於基點G的相對速度。


應用前段推導出的適用於任意含時向量的算符方程式,可以計算出 。由於從附體參考系B觀測,剛體內部每一點的位置都固定不變,項目 等於零:


- ;

其中, 是剛體的角速度向量。
所以,點P的速度為
- 。

點P的加速度 為

- ;

其中, 、 分別是基點G的加速度、點P對於基點G的相對加速度。


再應用前段推導出的算符方程式,可以計算出
- ;

其中, 是附體參考系B旋轉的角加速度向量。

運動約束
「運動約束」指的是一個動態系統的運動必須符合的約束條件。以下列出一些例子:
純滾動
假若,一個圓柱形物體滾動於平面上,不做任何滑動運動(物體與平面之間,沒有任何滑動摩擦),則這物體的運動稱為「純滾動」,其質心的速度 必須符合約束條件:

- ;

其中, 是旋轉的角速度, 是從物體與平面的接觸點到物體質心的位移向量。

對於物體在滾動時不傾斜或不轉彎的案例,這約束條件約化為
- 。

参见
- 質點運動實例
- 力学
註釋
- 例如,試想在您住家的南方,距離50公尺之遠,有一座巨塔。從這句話,可以知道,參考點是住家,距離是50公尺,方向是朝南方。假設,遊客問您:「巨塔在哪裡?」您只回答說:「巨塔是在南方,距離有50公尺之遠的地方。」很自然地,遊客會疑問:「在哪裏的南方50公尺?」假若您只回答說:「巨塔是在住家的南方。」遊客立刻就會問到:「離住家有多遠?」假若您只回答說:「巨塔離住家有50公尺遠。」則遊客緊接地就會問到:「是朝哪個方向?」所以,這三個資料唯一地決定了點P的位置。
參考文獻
- Beer, Ferdinand; Johnston, Jr., E. Russ, 7th: pp. 602, 2004, ISBN 007230492s 请检查
|isbn=值 (帮助) - Whittaker, Edmund. . Cambridge University Press. 1917: chapter 1.
- R. Douglas Gregory. . Cambridge: Cambridge University. 2006: pp. 475–476. ISBN 0521826780.
- Lorenzo Sciavicco, Bruno Siciliano. . 2nd. Springer. 2000: 32. ISBN 1852332212.
- William Thomson Kelvin & Peter Guthrie Tait. . Cambridge University Press. 1894: 4. ISBN 1573929840.
- Morris Kline. . Oxford University Press. 1990. ISBN 0195061365.
延伸阅读
- Moon, Francis C. . Springer. 2007. ISBN 9781402055980.
外部連結
- 一維勻加速運動學Java模擬 (页面存档备份,存于)
- 負加速度代表減速嗎? (页面存档备份,存于)
- 康乃爾大学运动学数位图书馆 (页面存档备份,存于)
- 教育部進修網站:運動學