| Angular displacement | |
|---|---|
 | |
Other names | rotational displacement, angle of rotation |
Common symbols | θ, ϑ, φ |
| SI unit | radians, degrees, turns, etc. (any angular unit) |
| In SI base units | radians (rad) |
| Part of a series on |
| Classical mechanics |
|---|
|

The angular displacement (symbol θ, ϑ, or φ) – also called angle of rotation, rotational displacement, or rotary displacement – of a physical body is the angle (in units of radians, degrees, turns, etc.) through which the body rotates (revolves or spins) around a centre or axis of rotation. Angular displacement may be signed, indicating the sense of rotation (e.g., clockwise); it may also be greater (in absolute value) than a full turn.
Context
When a body rotates about its axis, the motion cannot simply be analyzed as a particle, as in circular motion it undergoes a changing velocity and acceleration at any time. When dealing with the rotation of a body, it becomes simpler to consider the body itself rigid. A body is generally considered rigid when the separations between all the particles remains constant throughout the body's motion, so for example parts of its mass are not flying off. In a realistic sense, all things can be deformable, however this impact is minimal and negligible.
Example
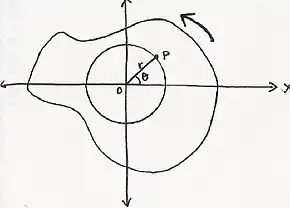
In the example illustrated to the right (or above in some mobile versions), a particle or body P is at a fixed distance r from the origin, O, rotating counterclockwise. It becomes important to then represent the position of particle P in terms of its polar coordinates (r, θ). In this particular example, the value of θ is changing, while the value of the radius remains the same. (In rectangular coordinates (x, y) both x and y vary with time.) As the particle moves along the circle, it travels an arc length s, which becomes related to the angular position through the relationship:

Definition and units
Angular displacement may be expressed in radians or degrees. Using radians provides a very simple relationship between distance traveled around the circle (circular arc length) and the distance r from the centre (radius):

For example, if a body rotates 360° around a circle of radius r, the angular displacement is given by the distance traveled around the circumference - which is 2πr - divided by the radius: which easily simplifies to: . Therefore, 1 revolution is radians.



The above definition is part of the International System of Quantities (ISQ), formalized in the international standard ISO 80000-3 (Space and time),[1] and adopted in the International System of Units (SI).[2][3]
Angular displacement may be signed, indicating the sense of rotation (e.g., clockwise);[1] it may also be greater (in absolute value) than a full turn. In the ISQ/SI, angular displacement is used to define the number of revolutions, N=θ/(2π rad), a ratio-type quantity of dimension one.
In three dimensions
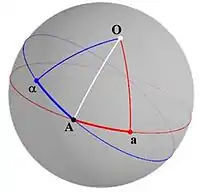
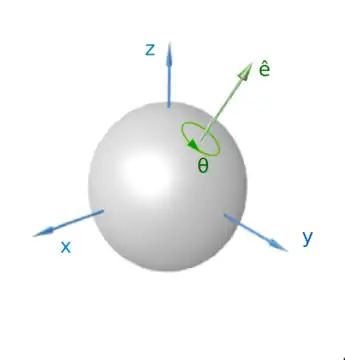
In three dimensions, angular displacement is an entity with a direction and a magnitude. The direction specifies the axis of rotation, which always exists by virtue of the Euler's rotation theorem; the magnitude specifies the rotation in radians about that axis (using the right-hand rule to determine direction). This entity is called an axis-angle.
Despite having direction and magnitude, angular displacement is not a vector because it does not obey the commutative law for addition.[4] Nevertheless, when dealing with infinitesimal rotations, second order infinitesimals can be discarded and in this case commutativity appears.
Rotation matrices
Several ways to describe rotations exist, like rotation matrices or Euler angles. See charts on SO(3) for others.
Given that any frame in the space can be described by a rotation matrix, the displacement among them can also be described by a rotation matrix. Being and two matrices, the angular displacement matrix between them can be obtained as . When this product is performed having a very small difference between both frames we will obtain a matrix close to the identity.



In the limit, we will have an infinitesimal rotation matrix.
Infinitesimal rotation matrices
An infinitesimal rotation matrix or differential rotation matrix is a matrix representing an infinitely small rotation.
While a rotation matrix is an orthogonal matrix representing an element of (the special orthogonal group), the differential of a rotation is a skew-symmetric matrix in the tangent space (the special orthogonal Lie algebra), which is not itself a rotation matrix.




An infinitesimal rotation matrix has the form

where is the identity matrix, is vanishingly small, and



For example, if representing an infinitesimal three-dimensional rotation about the x-axis, a basis element of



See also
References
- 1 2 "ISO 80000-3:2019 Quantities and units — Part 3: Space and time" (2 ed.). International Organization for Standardization. 2019. Retrieved 2019-10-23. (11 pages)
- ↑ Le Système international d’unités [The International System of Units] (PDF) (in French and English) (9th ed.), International Bureau of Weights and Measures, 2019, ISBN 978-92-822-2272-0
- ↑ Thompson, Ambler; Taylor, Barry N. (2020-03-04) [2009-07-02]. "The NIST Guide for the Use of the International System of Units, Special Publication 811" (2008 ed.). National Institute of Standards and Technology. Retrieved 2023-07-17.
- ↑ Kleppner, Daniel; Kolenkow, Robert (1973). An Introduction to Mechanics. McGraw-Hill. pp. 288–89. ISBN 9780070350489.
- ↑ (Goldstein, Poole & Safko 2002, §4.8)
Sources
- Goldstein, Herbert; Poole, Charles P.; Safko, John L. (2002), Classical Mechanics (third ed.), Addison Wesley, ISBN 978-0-201-65702-9
- Wedderburn, Joseph H. M. (1934), Lectures on Matrices, AMS, ISBN 978-0-8218-3204-2
