
In triangle geometry, an inellipse is an ellipse that touches the three sides of a triangle. The simplest example is the incircle. Further important inellipses are the Steiner inellipse, which touches the triangle at the midpoints of its sides, the Mandart inellipse and Brocard inellipse (see examples section). For any triangle there exist an infinite number of inellipses.
The Steiner inellipse plays a special role: Its area is the greatest of all inellipses.
Because a non-degenerate conic section is uniquely determined by five items out of the sets of vertices and tangents, in a triangle whose three sides are given as tangents one can specify only the points of contact on two sides. The third point of contact is then uniquely determined.
Parametric representations, center, conjugate diameters
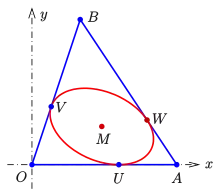

The inellipse of the triangle with vertices

and points of contact

on and respectively can by described by the rational parametric representation



where are uniquely determined by the choice of the points of contact:


The third point of contact is

The center of the inellipse is

The vectors


are two conjugate half diameters and the inellipse has the more common trigonometric parametric representation



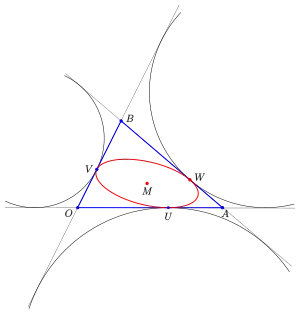
The Brianchon point of the inellipse (common point of the lines ) is


Varying is an easy option to prescribe the two points of contact . The given bounds for guarantee that the points of contact are located on the sides of the triangle. They provide for the bounds .


Remark: The parameters are neither the semiaxes of the inellipse nor the lengths of two sides.
Examples
Steiner inellipse
For the points of contact are the midpoints of the sides and the inellipse is the Steiner inellipse (its center is the triangle's centroid).


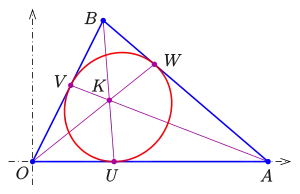
Incircle
For one gets the incircle of the triangle with center


Mandart inellipse
For the inellipse is the Mandart inellipse of the triangle. It touches the sides at the points of contact of the excircles (see diagram).

Brocard inellipse
For one gets the Brocard inellipse. It is uniquely determined by its Brianchon point given in trilinear coordinates .


Derivations of the statements
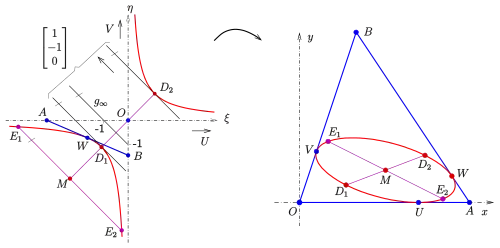





- New coordinates
For the proof of the statements one considers the task projectively and introduces convenient new inhomogene --coordinates such that the wanted conic section appears as a hyperbola and the points become the points at infinity of the new coordinate axes. The points will be described in the new coordinate system by and the corresponding line has the equation . (Below it will turn out, that have indeed the same meaning introduced in the statement above.) Now a hyperbola with the coordinate axes as asymptotes is sought, which touches the line . This is an easy task. By a simple calculation one gets the hyperbola with the equation . It touches the line at point .

![{\displaystyle A=[a,0],B=[0,b]}](../I/e20a3ed09ce0085040d3b2cc37c6303cc137539e.svg)



![{\displaystyle W=[{\tfrac {a}{2}},{\tfrac {b}{2}}]}](../I/9b2fe07d55a71a4127507e0c14cfa001b1f1824d.svg)
- Coordinate transformation
The transformation of the solution into the x-y-plane will be done using homogeneous coordinates and the matrix
- .

A point is mapped onto
![{\displaystyle [x_{1},x_{2},x_{3}]}](../I/51a96ce7336b520a13d666da01d29a958ba2ab0c.svg)

A point of the --plane is represented by the column vector (see homogeneous coordinates). A point at infinity is represented by .
![{\displaystyle [\xi ,\eta ]}](../I/03bdcaa9622ae82e479c0b910f97e3d0e992fa5d.svg)
![{\displaystyle [\xi ,\eta ,1]^{T}}](../I/8e0c3209483f658ed3d8d2c2af76cceb3850cdf5.svg)
![{\displaystyle [\cdots ,\cdots ,0]^{T}}](../I/5a472efb9e56c1741ebfa49b91fa776aa91e4b2a.svg)
- Coordinate transformation of essential points
- (One should consider: ; see above.)
![{\displaystyle U:\ [1,0,0]^{T}\ \rightarrow \ (u_{1},u_{2})\ ,\quad V:\ [0,1,0]^{T}\ \rightarrow \ (v_{1},v_{2})\ ,}](../I/6c497b1f88e79030ca93f2a180c0684334572003.svg)
![{\displaystyle O:\ [0,0]\ \rightarrow \ (0,0)\ ,\quad A:\ [a,0]\rightarrow \ (a_{1},a_{2})\ ,\quad B:\ [0,b]\rightarrow \ (b_{1},b_{2})\ ,}](../I/25ef40c3ddad1e9bdeb9c7591474b55851361497.svg)

is the equation of the line at infinity of the x-y-plane; its point at infinity is .

![{\displaystyle [1,-1,0]^{T}}](../I/d1bcd1eb14d3670f46f18d86d73a10b44175c1e7.svg)
![{\displaystyle [1,-1,{\color {red}0}]^{T}\ \rightarrow \ (u_{1}-v_{1},u_{2}-v_{2},{\color {red}0})^{T}}](../I/5de3b0fd1b4aad1b8dbdb47b38fae93679184665.svg)
Hence the point at infinity of (in --plane) is mapped onto a point at infinity of the x-y-plane. That means: The two tangents of the hyperbola, which are parallel to , are parallel in the x-y-plane, too. Their points of contact are
![{\displaystyle D_{i}:\left[{\frac {\pm {\sqrt {ab}}}{2}},{\frac {\pm {\sqrt {ab}}}{2}}\right]\ \rightarrow \ {\frac {1}{2}}{\frac {\pm {\sqrt {ab}}}{1\pm {\sqrt {ab}}}}\;(u_{1}+v_{1},u_{2}+v_{2}),\;}](../I/7052800026aaac4c4ae076e61cd2a1cc4afa2adc.svg)
Because the ellipse tangents at points are parallel, the chord is a diameter and its midpoint the center of the ellipse



One easily checks, that has the --coordinates
![{\displaystyle \ M:\;\left[{\frac {-ab}{2}},{\frac {-ab}{2}}\right]\;.}](../I/4ae4ee71147e7a2b13b7d335cf7bcb81c3cef83a.svg)
In order to determine the diameter of the ellipse, which is conjugate to , in the --plane one has to determine the common points of the hyperbola with the line through parallel to the tangents (its equation is ). One gets . And in x-y-coordinates:


![{\displaystyle E_{i}:\left[{\tfrac {-ab\pm {\sqrt {ab(ab-1)}}}{2}},{\tfrac {-ab\mp {\sqrt {ab(ab-1)}}}{2}}\right]}](../I/a770d90aaa18c9e0928f1342be65ab53c1df35ec.svg)

From the two conjugate diameters there can be retrieved the two vectorial conjugate half diameters

![{\displaystyle {\begin{aligned}{\vec {f}}_{1}&={\vec {MD_{1}}}={\frac {1}{2}}{\frac {\sqrt {ab}}{ab-1}}\;(u_{1}+v_{1},u_{2}+v_{2})\\[6pt]{\vec {f}}_{2}&={\vec {ME_{1}}}={\frac {1}{2}}{\sqrt {\frac {ab}{ab-1}}}\;(u_{1}-v_{1},u_{2}-v_{2})\;\end{aligned}}}](../I/051c4b96e2a66a70990e8af3c4faad92bcb65026.svg)
and at least the trigonometric parametric representation of the inellipse:
Analogously to the case of a Steiner ellipse one can determine semiaxes, eccentricity, vertices, an equation in x-y-coordinates and the area of the inellipse.
The third touching point on is:


![{\displaystyle W:\left[{\frac {a}{2}},{\frac {b}{2}}\right]\ \rightarrow \ \left({\frac {u_{1}a+v_{1}b}{a+b+2}}\;,\;{\frac {u_{2}a+v_{2}b}{a+b+2}}\right)\;.}](../I/4c12e425cfa9038ab72d6f9ccd25447915a5aa0f.svg)
The Brianchon point of the inellipse is the common point of the three lines . In the --plane these lines have the equations: . Hence point has the coordinates:

![{\displaystyle K:\ [a,b]\ \rightarrow \ \left({\frac {u_{1}a+v_{1}b}{a+b+1}}\;,\;{\frac {u_{2}a+v_{2}b}{a+b+1}}\right)\ .}](../I/25a6a51aecf46a39ee8a67c88ebd39922423804e.svg)
Transforming the hyperbola yields the rational parametric representation of the inellipse:

![{\displaystyle \left[\xi ,{\frac {ab}{4\xi }}\right]\ \rightarrow \ \left({\frac {4u_{1}\xi ^{2}+v_{1}ab}{4\xi ^{2}+4\xi +ab}},{\frac {4u_{2}\xi ^{2}+v_{2}ab}{4\xi ^{2}+4\xi +ab}}\right)\ ,\ -\infty <\xi <\infty \ .}](../I/3c3a222e4fc60737d44af7ad7fd5c611518d1cec.svg)
- Incircle

For the incircle there is , which is equivalent to

- (1) Additionally
- (2). (see diagram)


Solving these two equations for one gets
- (3)

In order to get the coordinates of the center one firstly calculates using (1) und (3)

Hence

- Mandart inellipse
The parameters for the Mandart inellipse can be retrieved from the properties of the points of contact (see de: Ankreis).
- Brocard inellipse
The Brocard inellipse of a triangle is uniquely determined by its Brianchon point given in trilinear coordinates .[1] Changing the trilinear coordinates into the more convenient representation (see trilinear coordinates) yields . On the other hand, if the parameters of an inellipse are given, one calculates from the formula above for : . Equalizing both expressions for and solving for yields





Inellipse with the greatest area
- The Steiner inellipse has the greatest area of all inellipses of a triangle.
- Proof
From Apollonios theorem on properties of conjugate semi diameters of an ellipse one gets:

- (see article on Steiner ellipse).

For the inellipse with parameters one gets


where .
In order to omit the roots, it is enough to investigate the extrema of function :



Because one gets from the exchange of s and t:


Solving both equations for s and t yields
- which are the parameters of the Steiner inellipse.


See also
References
- ↑ Imre Juhász: Control point based representation of inellipses of triangles, Annales Mathematicae et Informaticae 40 (2012) pp. 37–46, p.44
External links
- Darij Grinberg: Über einige Sätze und Aufgaben aus der Dreiecksgeometrie
- Circumconic at MathWorld
- Inconic at MathWorld