六自由度
六自由度(Six degrees of freedom)是指剛體在三維空間中運動的六个自由度,即在纵轴(前—後)、横轴(左—右)和 垂轴(上—下)三個互相垂直的坐標軸上进行的平移和旋轉。这三个轴通常以刚体所面向或行进的方向为参照,比如航空器三主轴。
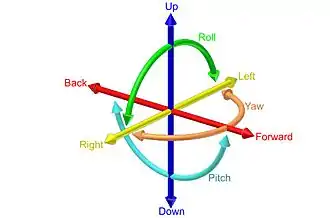
平移是指与某一参照轴平行的位置变化,三个轴上的平移分别是:
- 纵轴——前进和后退;
- 横轴——左移和右移;
- 垂轴——上升和下降。
旋转是指围绕某一参照轴的姿态变化,三个轴上的旋转分别是:
- 纵轴——翻滾(roll),分逆时针翻(左翻)和顺时针翻(右翻);
- 横轴——俯仰(pitch),分上仰和下俯;
- 垂轴——偏擺(yaw),分左摆和右摆。
。
機器人
串行及並聯機器手臂系統一般會設定可以以六個自由度的方式幫物體定位,其中包括三個平移自由度以及三個旋轉自由度。因此在機器手臂的組態以及致動器的位置之間會有對應關係,此關係是由正運動學及逆运动学所定義的。
机器人的自由度是其重要的性能指標。其數字一般是指其單臂上旋轉關節的數量,其自由度越高,表示其到達特定位置的靈活度就越高。這個是實務上的度量方式,和表示系統整體定位能力的絶對自由度不同[1]。
2007年時,賽格威的發明者狄恩·卡门為國防高等研究計劃署(DARPA)提出了一個機器手臂的原型[2],共有14個自由度。類人型機器人的自由度至少會有30個,每一個手臂會有六個自由度,每一隻腳有五到六個自由度,而軀幹及頸也有更多的自由度[3]。
工程
力學系統中的自由度很重要,特別在生物力学中會需要分析及量測,以確認其是否有六個自由度。六個自由度的量測是透過感測器以及交流或是直流的磁場(或電磁場),感測器會送出位移及旋轉信號給處理器。會透過使用者的需求以及規範,透過軟體得到這些資料。
Ascension Technology Corporation已經開發了小到可以放在活檢針頭內的6DoF設備,可以讓醫生可以進行較好的研究。新的感測器接收發射器(cubic transmitter或flat transmitter)產生的脈衝直流磁場,醫療產品代工生产商可以以此資料進行整合[4]。
像船隻在海上的行動就是一個六自由度的例子。可以描述如下[5]:
平移:
- 沿X軸前後移動
- 沿Y軸左右移動
- 沿Z軸上下移動
旋轉:
- 繞X軸旋轉(翻滾、roll)。
- 繞Y軸前後旋轉(俯仰、pitch)
- 繞Z軸左右旋轉(偏擺、yaw)。
依運作範圍分類
六自由度系統依運作範圍可以分為三類:分別是直接型(Direct)、半直接型(Semi-direct,或稱為條件型)、以及非直接型(Non-direct),這三類都和機械運作需要的時間、執行運作需要的能量、運作是由人或是電腦下達指令無關。
- 直接型(Direct type):在正常運作下,可以針對某一自由度直接進行控制,不需要特殊的的條件(例如飛機上的副翼)。
- 半直接型(Semi-direct):在特殊條件成立,才可以針對某一自由度直接進行控制(例如飛機上的推力反向器)。
- 非直接型(Non-direct):自由度的調整是透過和環境的交互作用來達成,不能直接控制(例如海上船隻的俯仰運動)。
有些系統也會出現過渡型的情形。例如航天飞机在太空中飛行時,因為可以直接控制六個自由度,六自由度都是直接型。但在返回地面,進入大氣層的過程中,因為許多技術限制,無法進行六自由度的直接型控制。
游戏
在電腦遊戲中,也會用自由度來說明遊戲中允許活動的程度。
第一人称射击游戏(FPS)一般會有五個自由度:前進/後退、往左/往右移動、上/下(跳躍/蹲伏/躺下)、左轉/右轉及往上看/往下看。若遊戲允許讓主角往左/右傾斜身體,則有六個自由度,不過這個不太容易準確的進行控制。
六自由度(6DoF)有時也用來描述允許自由移動的遊戲,可能不一定有六個自由度,例如死亡空间2、甚至萬艦齊發及终极地带系列都允計自由移動。
也有一些真正有六自由度的遊戲,包括在三軸的平移以及在三軸的旋轉,例如Shattered Horizon、天旋地轉、Retrovirus、Miner Wars、Space Engineers等。
像TrackIR之類的運動跟踪設備也會用在六自由度的頭部追蹤。像飛行模擬器及其他車輛模擬器中會用到,在遊戲中需要環顧驾驶舱找到敌人,或者只是避免在遊戲中發生意外。
有時也會出現三自由度(3DoF),這表示允許在三個軸平移,但不允許旋轉。
PC運動控制器Razer Hydra利用二個nunchuck的Wii遙控器來追踨位置及轉動,每一隻手都有六個自由度。
相關條目
- 自由度 (工程学)
- 船舶运动
參考資料
- Paul, Richard P., Robot Manipulators: Mathematics, Programming, and Control, MIT Press, 1981.
- . ted.com. 2007-03-01 [2017-02-26]. (原始内容存档于2014-02-18).
- Craig, John J., Introduction to Robotics: Mechanics and Control, Addison-Wesley, 1986.
- Medical News Today. (页面存档备份,存于) Ascension Develops World's Smallest Six Degrees-of-Freedom Sensor For Emerging Medical Procedures. 25 Aug 2008
- (PDF). [2017-03-11]. (原始内容存档 (PDF)于2011-11-25).