切比雪夫連桿機構
切比雪夫連桿機構(Chebyshev linkage)是一種可將旋轉運動轉換為近似直線運動的连杆机构,屬於平面四杆机构,且其構形中有出現交叉四邊形。
切比雪夫連桿機構
切比雪夫連桿機構是由十九世紀的數學家巴夫努提·列沃維奇·切比雪夫所發明,他研究的主題是運動學的理論問題。其中一個問題是建構可以將旋轉運動轉換為近似直線運動的連桿。詹姆斯·瓦特在改進其蒸汽机時,也曾研究過此一主題[1]。
直線運動的連桿會限制點P–杆L3的中點–在二個極限位置中間的直線上。(L1, L2, L3和L4如圖所示)。在這段行程範圍中,P的軌跡近似直線,只有少許的偏移。各桿的比例為

點P是L3的中點。上述關係確保當連桿在直線行程的極限位置時,L3會是垂直的。[2]
各桿長度的關係如下:

可以證明若各桿的比例如上,則下式成立

且可以讓P有近似直線的軌跡。
運動方程
可以找出連桿隨輸入角變化的運動方程,隨著輸入角的變化,其速度及受力也隨之改變。輸入角可以是L2相對水平線的角度,或是L4相對水平線的角度。不論輸入角為何,都可以計算連桿L3中點的軌跡,假設L3靠右側的端點為A,靠左側的端點為B,而其中點為P,以L2不動的端點為原點,可得A的方程[2]:


點B的運動可以用另一個角來計算


最終,可以得到輸出角和輸入角之間的關係:
![{\displaystyle \varphi _{2}=\arcsin \left[{\frac {L_{2}\,\sin(\varphi _{1})}{\overline {AO_{2}}}}\right]-\arccos \left({\frac {L_{4}^{2}+{\overline {AO_{2}}}^{2}-L_{3}^{2}}{2\,L_{4}\,{\overline {AO_{2}}}}}\right)\,}](../I/755bcb0849486de8fc76bced42bcf8bed7d7e1ad.svg)
其中的是A點和O2點之間的直線距離。


依照上式可以寫出P點的方程。


輸入角
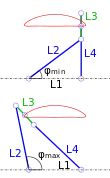
極限位置的說明
在維持近似直線運動的情形下,輸入角的極限分別是:


相關條目
切比雪夫λ連桿機構(藍色和綠色)可以產生幾乎直線的軌跡
- 切比雪夫λ連桿機構
- 瓦特氏直線運動機構,類似的直線機構。
- 直線運動機構
- Scott Russell機構
- 霍肯連桿機構:產生近似直線軌跡的四桿機構
- 波塞利耶-利普金机械:產生直線軌跡的八桿機構
參考資料
- Cornell university (页面存档备份,存于) - Cross link straight-line mechanism
- Gezim Basha (页面存档备份,存于) - Rotation to approximate translation using the Chebyshev Linkage
外部連結
| 维基共享资源中相关的多媒体资源:切比雪夫連桿機構 |
- Cornell university, "How to draw a straight line, by A.B. Kempe, B.A." (页面存档备份,存于)
- A simulation (页面存档备份,存于) using the Molecular Workbench software
- A Geogebra simulation of the linkage
- Kinematic analysis and synthesis of four-bar mechanisms for straight line coupler curves (页面存档备份,存于)
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.