实时控制系统
实时控制系统(Real-time Control System,RCS)是一个由美國NIST開發的参考模型架构,适合于许多软件密集型的、实时的控制问题领域。实时控制系统的参考模型架构會定義实时智能控制系统需要哪些功能类型,以及這些功能類型之間的關係。
RCS不是系統設計,也不是描述如何實現特定系統的規範。RCS會以一組有良好基礎的工程学原則為基礎,訂定分层控制系统,來組織复杂的系統。每一層的控制处理节点都源自同一個泛用节点模型[1]。
RCS對於控制系統的設計、工程、整合及測試有全面性的方法。架構分析師會一直將系統的任務及資訊分割為較精細,有限範圍,可控制並且有效率的子單元。RCS著重於智能控制,可以適應不確定及沒有結構的作業環境。其主要關注點在感測、感知、知識、成本、學習、計劃及執行[1]。
簡介
参考模型架构是種正則型式,而非系統設計的規格。RCS参考模型架構結合了實時運動的規劃,以及高階任務計劃;解決問題、世界建模、疊代的狀態估計、觸覺及視覺的影像處理、聲音的特征分析。而RCS概念的演化是受到文獻中已知的大部份智能控制系統的特質及能力所影響,設法要達到這些的特質及能力[2] 。
RCS是設計為智能代理架構,可以有任何程度的智能行為,甚至包括人類的程度在內。RCS是受到小腦(腦部控制精細運動協調以及有意識動作的區域)的理論模型所影響。一開始是設計為實驗室的操纵器,是感覺互動型,直接目標型的控制。在三十年後,已演化成針對智能機器工具、工廠自動化系統、智能自駕汽車的實時控制架構[3]。
RCS適用許多不同的問題領域,包括工廠生產以及車輛的應用。以RCS架構為基礎的系統已經用在許多不同的應用中,包括工具機中零件及工具的裝載及卸載、加工工作站的控制、用機器手臂進行工件的去毛刺和倒角、控制太空站的遠端機器人、控制多個自動海底車輛、無人駕駛陸地車輛、自動採礦系統、郵務服務及處理系統,以及海底作業的自動化系統[2]。
歷史
隨著對於智能行為複雜性及其哲學的瞭解越來越多,RCS也演進出許多不同的版本。第一版的實現是在1970年代中期,由Barbera為感測互動機器人所設計[4]。
RCS-1
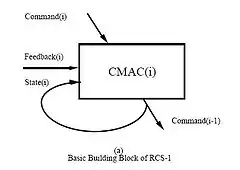
RCS-1是強調結合命令及感測回授,因此可以結合目標及狀態,計算適當的回應。此應用程式在視覺訴求的任務中,可以配合結構化的光學視覺系統來控制機械手臂。RCS-1明顯的受到数学模型的影響,像是Marr-Albus模型[5]以及小腦模型類神經網路(CMAC)模型[6][2]。
若CMAC的一些輸出是直接回饋到輸入時,CMAC就變成有限状态机。因此RCS-1可以實現為用不同控制層級分層規劃的一組狀態機。在每個層級,輸入命令會有效率的選擇一個行為,這些行為是以刺激-反應模型的反馈來驅動。因此CMAC就成為了RCS-1的參考模型建構模塊,如圖所示。
建構模塊的階層可以用來實現階層行為,如尼古拉斯·廷贝亨[7]及其他人所觀察到的一樣。RCS-1在許多層面類似罗德尼·布鲁克斯的包容体系结构(subsumption architecture)[8],不過RCS是以命令表示的目標來選擇其行為,而包容体系结构是由包容体系中的事實來選擇行為[2]。
RCS-2
下一代的RCS-2是由1980年代早期由國家標準技術研究所自动化制造研究基地(AMRF)的Barbera、Fitzgerald、Kent等人針對製造控制所開發[9][10][11]。基本的RCS-2建構模塊如圖所示。
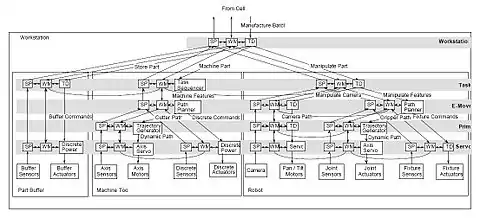
RCS-2的H函數仍然是有限状态机狀態表執行器。RCS-2的新功能是引入了由許多感測器處理演算法(包括結構光及Blob分析演算法)組成的G函數。其中,用RCS-2來定義八個層級的分層,包括伺服、座標轉換、E-Move、任務、Workstation、Cell、Shop及Facility levels of control。
最後只架設了前六層。有二個AMRF工作站完整實現了RCS-2中的五層。軍用領域Material Handling Robot (FMR)的控制系統[12]也是由RCS-2實現的,TMAP的無人地面載具計劃也RCS-2實現[2]。
RCS-3
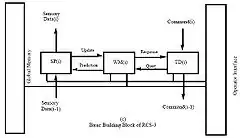
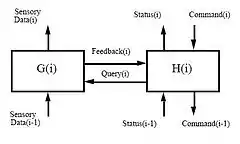
RCS-3是設計在NBS/DARPA的多重自主水下載具(MAUV)專案中使用[13],也適用於NASA/NBS為了太空站Flight Telerobotic Servicer所設計的標準參考模型遠端機器人控制系統架構(NASREM)[14],其基本建構模塊如圖。
RCS-3中主要的新特徵是世界模型以及操作者界面。世界模型的引入是任務規劃以及模型為基礎的感測器處理的基基礎。因此也讓任務分解模塊(TD)再進行調整,其中包括了工作分配器、以及針對每一個分配到工作的子系統的規劃器以及執行器。這大致對應Saridis的[15]三層控制架構[2]。
RCS-4
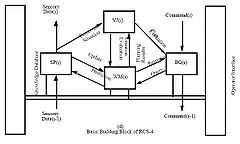
RCS-4是由NIST的機器人系統部門在1990年代所設計。其基本建構模塊如圖所示。主要的主特點是明確的劃分出價值判斷(Value Judgment,簡稱VJ)系統。VJ模組在RCS-4系統中的功能類似邊緣系統在大腦中的作用。VJ模組中的程式會計算計劃行動的成本、效益及风险,並且針對物體、材料、區域、情境、事件及結果給多不同的價值。價值狀態變數會定義為結果重要的事情,或是需要參與、攻擊、防守、協助或是進行其他行動的物體或區域。價值判斷在智慧控制系統的應用是由George Pugh提出[16]。價值判斷模組的架構及功能主要是由Albus(1991)所完成[2][17]。
RCS-4使用了行為產生(behavior generation, 簡稱BG)來取代RCS-3的任務5分解(decomposition, TD)。這個調整是要強調自主决策的程度。RCS-4可用來在沒有高頻寬通信的非結構化環境下,處理高度自主性的應用,例如在戰場上使用的無人機、深海、或是遙遠的行星上。這些應用需要自主的價值判斷以及複雜的實時感知能力。RCS-3仍會用在要求比較低的應用中,像是制造业、工地、近太空或淺海的遠程機器人,這些環境比較有結構,而且比較可以有高頻寛的通訊。在這些應用中,價值判斷會包括在任務規劃的過程,或是由操作人員輸入[2]。
軟體
NIST依照RCS参考模型架構,已發展了實時控制系統軟體函式庫。有針對C++、Java及Ada的程式,也有巨集、工具、makefile及文件,讓程式設計者可以用在嵌入式系统中,特別是有使用針對智能系統設計的参考模型架構的程式[18]。
應用
- ISAM架構是在製造領域的RCS應用。
- 4D-RCS参考模型架構是在車輛領域的RCS應用。
- NASA/NBS Standard Reference Model for Telerobot Control Systems Architecture(NASREM)是在太空領域的應用。
參考資料
- NIST ISD Research areas (页面存档备份,存于) overview. Last Updated: 5/12/2003. Accessed Aug 2, 2009.
- James S. Albus (1992). A Reference Model Architecture for Intelligent Systems Design (页面存档备份,存于) Intelligent Systems Division, Manufacturing Engineering Laboratory, National Institute of Standards and Technology.
- Jim Albus, Tony Barbera, Craig Schlenoff (2004). "RCS: An Intelligent Agent Architecture (页面存档备份,存于)" In: Proc. of 2004 AAAI Conference: Workshop on Intelligent Agent Architectures: Combining the Strengths of Software Engineering & Cognitive Systems, San Jose, CA.
- A.J. Barbera, J.S. Albus, M.L. Fitzgerald (1979). "Hierarchical Control of Robots Using Microcomputers". In: Proceedings of the 9th International Symposium on Industrial Robots, Washington, DC, March 1979.
- J.S. Albus (1971). "A Theory of Cerebellar Function". In: Mathematical Biosciences, Vol. 10, pgs. 25–61, 1971
- J.S. Albus (1975). "A New Approach to Manipulator Control : The Cerebellar Model Articulation Controller (CMAC)". In: Transactions ASME, September 1975.
- Nico Tinbergen (1951). The Study of Instinct. Clarendon, Oxford.
- Rodney Brooks (1986). "A Robust Layered Control System for a Mobile Robot". In: IEEE Journal of Robotics and Automation. Vol. RA-2, [1], March, 1986.
- J.A. Simpson, R.J. Hocken, J.S. Albus (1983). "The Automated Manufacturing Research Facility of the National Bureau of Standards". In: Journal of Manufacturing Systems, Vol. 1, No. 1, 1983.
- J.S. Albus, C. McLean, A.J. Barbera, M.L. Fitzgerald (1982). "An Architecture for Real-Time Sensory-Interactive Control of Robots in a Manufacturing Environment". In: 4th IFAC/IFIP Symposium on Information Control Problems in Manufacturing Technology. Gaithersburg, MD, October 1982
- E. W. Kent, J.S. Albus (1984). "Servoed World Models as Interfaces Between Robot Control Systems and Sensory Data". In: Robotica, Vol. 2, No.1, January 1984.
- H.G. McCain, R.D. Kilmer, S. Szabo, A. Abrishamian (1986). "A Hierarchically Controlled Autonomous Robot for Heavy Payload Military Field Applications". In: Proceedings of the International Conference on Intelligent Autonomous Systems. Amsterdam, The Netherlands, December 8–11, 1986.
- J.S. Albus (1988). System Description and Design Architecture for Multiple Autonomous Undersea Vehicles. National Institute of Standards and Technology, Technical Report 37 1251, Gaithersburg, MD, September 1988.
- J.S. Albus, H.G. McCain, R. Lumia (1989). NASA/NBS Standard Reference Model for Telerobot Control System Architecture (NASREM). National Institute of Standards and Technology, Technical Report 1235, Gaithersburg, MD, April 1989.
- George N. Saridis (1985). Foundations of the Theory of Intelligent Controls. IEEE Workshop on Intelligent Control, 1985
- G.E. Pugh, G.L. Lucas, (1980). Applications of Value-Driven Decision Theory to the Control and Coordination of Advanced Tactical Air Control Systems. Decision-Science Applications, Inc., Report No. 218, April 1980
- J.S. Albus (1991). "Outline for a Theory of Intelligence". In: IEEE Trans. on Systems, Man, and Cybernetics. Vol. 21, No. 3, May/June 1991.
- Real-Time Control Systems Library –– Software and Documentation (页面存档备份,存于) at nist.gov. Accessed Aug 4, 2009.
 本条目引用的公有领域材料来自National Institute of Standards and Technology的网站或文档。
本条目引用的公有领域材料来自National Institute of Standards and Technology的网站或文档。