异步电动机
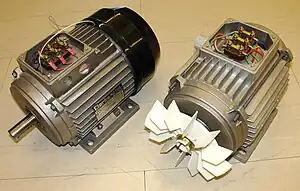
异步电动机(英語:)也稱為感應电动机(induction motor),简称 IM 或 ACIM,是一种由定子線圈利用電磁感應的方式使轉子產生電流,讓電動機產生力矩[1]的交流电动机。异步电机可按转子绕组形式,分为绕线式和鼠笼式[lower-alpha 1]。繞線型的均為三相電動機,而鼠笼式的有三相電動機,也有單相電動機。鼠笼式感應电动机的轉子可以不用連接电动机外部的電路[lower-alpha 2][lower-alpha 3]。

三相异步电动机是工业用的电动机械,其功率范围从几瓦到上万千瓦,具有广泛的应用范围。三相异步电动机由三相电路为其提供动力,因為不需啟動電路,而且可靠、價格不高,主要应用于挖掘,流体输送等需要提供动力的领域,例如机床、中小型轧钢设备、风机、水泵、轻工机械、冶金和矿山机械等。在化工,物流,工程制造等领域都广泛应用。其中主要是以鼠籠式异步电动机為主。单相异步电动机主要用在負載較小的場合,电风扇、洗衣机、电冰箱、空调器等家用电器等。
异步電動機的傳統應用是用在定速的場合,不過越來越多的三相异步電動機應用是配合變頻器(VFD)或是變速驅動器使用。變頻器可以配合頻率調整輸出電壓,若是應用在離心型風扇、泵浦或是壓縮機上,配合感應馬達有可以達到節能的效果。
异步电动机若接在频率为f的电网上运行时,转速n与电网频率f之间不存在同步电动机那样的恒定的比例关系。同步轉速和轉子轉速之間有轉差,轉差率通常介乎3%到10%。如果轉子轉速高於同步轉速,則變成發電機。
历史


法國科學家弗朗索瓦·阿拉戈在1824年闡述了旋轉磁場的存在,他稱為阿拉戈旋轉。英國物理學家華特·貝利(Walter Baily)在1879年靠手動的將開關打開及關閉,展示了阿拉戈旋轉,算是第一個感應馬達的原型[2][3][4][5]。第一個沒有交換子的二相交流异步电动机則是由匈牙利工程師奧托·布拉什發明[6][7]。
第一個沒有交換子的三相异步电动机是由费拉里斯在1885年发明,並製作可用的電動機。而尼古拉·特斯拉在1887年獨立发明三相异步电动机。特斯拉在1887年11月申請了美國專利,部份專利在1888年5月獲准。而费拉里斯在1888年向杜林皇家科學會提出实验报告,对旋转磁场作了严格的科学描述,为以后开发异步电动机、自起动电动机奠定了基础。费拉里斯相信他所提出的旋转磁场理论以及他所开发的新产品在科学上的价值远远超过物质上的价值,因此他有意不为自己的发明申请专利,而是在实验室向公众演示这些最新成果[5][8]。特斯拉在同年5月向美国电气工程学会(AIEE)提交了技術論文《交流電動機及變壓器的新系統》(A New System for Alternating Current Motors and Transformers)[9][10][11][12][13],其中描述了三種四極電動機的架構:其中一個有四極轉子,是無法自啟動的磁阻馬達、另一個是轉子繞組接直流電的同步馬達,最後一個則是可以自啟動的繞線轉子感應电动机。
當時發展交流電系統的乔治·威斯汀豪斯,在1888年向特斯拉申請了專利授權,並且以费拉里斯异步电动机的概念申請了美國專利[14]。有一年的時間也雇用特斯拉為顧問。威斯汀豪斯指定員工查爾斯·F·斯科特協助特斯拉,後來也負責威斯汀豪斯公司的异步电动机開發[9][15][16][17]。米哈伊爾·多利沃-多布羅沃爾斯基在三相電力系統的開發上非常堅定,在1889年發明了籠型轉子的感應電動機,在1890年發明了三相多芯柱的变压器[18][19]。威斯汀豪斯公司在1892年製造了第一個實際可用的感應電動機,在1893年開發了多相赫兹的感應電動機,不過早期威斯汀豪斯公司的電動機是二相電的系統,轉子也是繞線型的轉子,一直到本傑明.G.拉姆才開發轉子條繞線(rotating bar winding)的轉子[9]。
英國通用電氣公司(GE)在1891年開始開發三相的感應電動機[9]。英國通用電氣公司和威斯汀豪斯公司在1896簽署了轉子條繞線(rotating bar winding)設計的交互授權協議,此設計也是後來的鼠籠型轉子[9],亞瑟·E·肯尼迪是第一個用复数(用j來表示-1的平方根)來處理交流分析中90º旋轉運算子的人[20]。GE公司的查爾斯·普羅透斯·斯泰因梅茨也發展了許多有關交流复数量的應用,其中包括一個分析工具,現在稱為感應電動機的斯泰因梅茨(Steinmetz)等效電路[9][21][22][23]。
异步电动机的发展迅速,1897年7.5馬力的异步电动机,同尺寸的异步电动机在1976年會輸出100HP的功率[9]。
运行原理
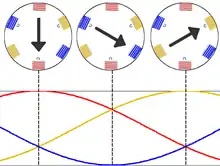
在异步电动机或是同步电动机中,都是由馬達定子通入交流電,產生和交流頻率相同的旋轉磁場。
异步电动机的转子绕组中没有使用外加电源供电,而是通过定子产生的旋转磁场(其转速为同步转速n1)与转子绕组的相对运动,转子绕组切割磁感线产生感应电动势,从而使转子绕组中产生感应电流[24],感應電流的方式類似變壓器中二次繞組感應電流的方式。
轉子繞組的感應電流會在轉子產生磁場來反抗定子磁場造成的變化。根據楞次定律,轉子上產生的磁場會和轉子電流上的電流變化相反。轉子繞組感應電流的原因是因為旋轉的定子磁場,因此為了和轉子繞組電流的變化相反,轉子和開始往定子旋轉磁場的方向旋轉。轉子會加速到轉子感應電流和力矩和轉子的機械負載平衡的時候為止。若轉子在同步轉速下旋轉,轉子和旋轉磁場沒有相對運動,不會產生感應電流,因此异步电动机的運轉速度會比同步轉矩略慢一點。真實轉速和同步轉速的轉速差相對同步轉速的比例稱為滑差(slip),針對轉矩曲線為標準設計B的感應馬達,其滑差會介於0.5%和5.0%之間[25]。异步电动机的特點就是其轉子電流和轉矩是由感應產生,而不像同步馬達或直流馬達由獨立轉子激磁電路產生,也不像永磁馬達是用永久磁鐵產生磁場[26]。
為了要產生轉子電流,轉子的實際轉速會比定子旋轉磁場的轉速()慢一些,否則旋轉磁場和轉子導體沒有相對運動,轉子上不會感應到電流。若轉子速度低於同步速度,且持續下降,轉子上的磁場旋轉速度會增加,感應的電流會變大,也會產生較大的力矩。轉子上感應到旋轉磁場的轉速和定子旋轉磁場轉速的比例稱為滑差。在有負載時,轉子速度會下降,會產生夠大的力矩推動負載旋轉。因此感應電動機也稱為是异步电动机[27]。

同步轉速
交流電動機的同步轉速,是定子旋轉磁場的轉速
- ,

其中是電源的頻率,是定子的磁極數,是機器的同步轉速。若的單位是赫茲,的單位是RPM,公式會變成下式:



例如一個三相的四極電動機, = 4,同步轉速 = 1,500 RPM( = 50 Hz)或1,800 RPM( = 60 Hz)。

像在「運行原理」段落右上方圖中的电枢是二極的三相電動機,其中三相共有六個磁極,每個磁極之間距離為60度。
滑差

滑差(slip)定義為相同頻率下,電機的同步轉速和轉子轉速差值,除以電機同步轉速後的比例,常以百分比表示。滑差定義為:


- 是同步轉速,即電動機旋轉磁場的轉速,單位rpm。
- 是轉子的機械速度,單位rpm。

若,則轉子轉速大於同步轉速,處於發電機模式。
若,則轉子轉速等於同步轉速。
若,則處於電動機模式。
若,電動機靜止。
若,則轉子轉速與同步轉速方向相反,轉子將會減速。
因為鼠籠式轉子的電阻很小,很小的滑差就可以產生轉子的大電流,因而產生夠大的轉矩[32]。在滿載時,小功率電動機或是特殊用途的滑差約為5%,若是大功率電動機,滑差會小於1%[33]。若功率不同的電動機直接以機械方式連接相同負載,其滑差的差異可能會造成負載分配的問題[33]。有許多方式可以減少滑差,其中配合變頻器的效果會比較好[33]。





轉矩
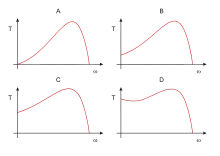
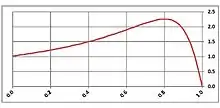
標準NEMA Design B多相感應電動機的速度-轉矩關係如圖右。這類電動機適用於像離心泵浦或是風扇等,不強調性能的負載。Design B的電動機的輸出會被以下幾個轉矩範圍所限制[25][lower-alpha 4]:
- 崩潰轉矩(Breakdown torque,最大轉矩):速度-轉矩曲線的最高點,額定轉矩的175-300%,。
- 堵轉轉矩(Locked-rotor torque,電動機靜止,滑差為100%的轉矩):額定轉矩的75-275%。
- 啟動轉矩(Pull-up torque):額定轉矩的65-190%。
在電動機正常的工作範圍內,速度-轉矩曲線的曲線會大致為線性,轉矩會大致和滑差成正比,因為等效電路中的轉子電阻會和滑差成反比 ,而在正常的工作範圍內,滑差較小,轉矩和轉子電阻成反比,也就和滑差成正比[34]。不過若負載超過額定轉矩,定子及轉子漏感的影響比轉子電阻要大,此時滑差變大時,轉矩仍會增加,但轉矩和滑差的關係不再是線性,斜率也會漸漸變緩。若負載轉矩超過崩潰轉矩,此時電動機的速度變慢,滑差會變大,而轉矩反而會下降,因此電動機會繼續減速,直到電動機堵轉為止。

啟動
小功率的异步电动机,可以依其架構分為三種:單相、分相(split-phase)及蔽極(shaded-pole),第三種則是多相的异步电动机。
兩極單相的异步电动机,在滑差為100%(零速)時沒有轉矩。因此需要調整定子設計(例如蔽極)來提供啟動轉矩。單相异步电动机需要額外的電路(啟動繞組),提供電動機的旋轉磁場。而單相电动机原來的運轉繞組可以讓電動機旋轉,而正轉或是反轉則是靠啟動繞組的電流方向而定。

在一些較小的單相電動機中,會用將獨立的銅線繞組繞住部份磁極的蔽極(shaded pole)方式來達到啟動的作用。此繞組產生的電流會遠大於供應定子的電流,使蔽極的磁極產生落後的磁場,這就會產生足夠的旋轉磁場來使電動機啟動,這一般會用在台扇或錄音機等啟動轉矩要求不高的應用中,此啟動方式效率不高,但是相較於其他的電動機架構或是啟動方式,此方式的成本最低。
較大功率的單相電動機是分相(split-phase)的電動機,有第二個定子繞組(啟動繞組)提供和主繞組有相位差的電流。此電流可能會透過串聯電容器產生,或是透過繞線方式,使其電阻及電感和主繞組不同。電容啟動(capacitor-start)設計的電動機,其啟動繞組在啟動後就斷路了,可能是透過安裝在馬達軸上的離心開關,或是透過熱敏電阻,在溫度升高時阻值變大,因此讓啟動繞組的電流小到其磁場可忽略的程度。電容運轉 (capacitor-run)設計的電動機,其第二個定子繞組在運轉時也會動作,因此可以提昇轉矩。電阻啟動(resistance start)會用啟動電阻串聯啟動繞組,以產生電抗。
多極感應電動機在靜止時也可以產生轉矩,通電即可自行起動。而常見的鼠籠式感應電動機啟動方式有直接啟動、降壓電抗器或是自耦變壓器啟動、Y-Δ切換啟動,近來也越來越多的感應電動機是用變頻器(VFD)啟動[35]。
多極感應電動機的轉子銅條可以設計成不同的形狀,對應不同的速度-轉矩特性。轉子銅條內的電流分佈會依感應電流的頻率而不同。在轉子靜止時,轉子電流的頻率和定子電流相同,而且會集中在轉子銅條的最外圍(集膚效應)。不同的轉子銅條除了對應不同的速度-轉矩特性外,也可以調整啟動時的湧浪電流。
多極電動機在其本質上可以自行起動,但其啟動轉矩及最大轉矩的設計值需要夠大,以克服實際負載條件。
若是繞線轉子的感應電動機,轉子電路會透過集電環連到外部電阻,用電阻來調整加速或是速度控制需要的速度-轉矩特性。
速度控制
電阻
在半導體电力电子学發展之前,很難去改變電氣頻率。當時的感應電動機主要是用在定速的應用。像是電動吊車等應用會用直流電動機驅動,另外一種作法是用有滑環的繞線轉子馬達(WRIM,也稱為滑環電動機),將轉子接到外加的可變電阻來調整速度。不過在繞線轉子馬達低速運作時,電阻的功率損失是一大缺點。尤其是在定速的場合下[36]。現今有許多大型的滑環電動機仍在使用,這些系統稱為滑環能量回收系統(slip energy recovery system),從轉子電路回收能量,整流後,再利用逆變器將電回送到電源。

架構
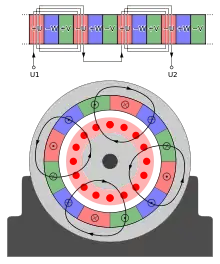
异步电动机的定子繞組可通電,產生通過轉子的磁場。為了讓磁場的分布可以最佳化,繞組會平均分布在定子的槽中。常見的异步电动机有三相及單相的,不過也有二相的异步电动机。理論上异步电动机的相數也可以是其他的正整數,而許多單相電動機會配合啟動電容器以產生和電源有90度相位差的電壓,因此也可以視為是二相電動機。單相电动机需要一些機制來產生啟動需要的旋轉磁場。鼠籠式感應電動機的轉子銅條會設計為和軸不平行的歪斜式,以避免磁鎖效應。
工業界中,標準NEMA及IEC電動機的椢架大小都已標準化,包括軸徑、電動機固定孔,以及電動機法蘭面等。而开启式防滴(open, drip proof、ODP)可以讓空氣進入定子內層繞組進行散熱,因此定子繞組溫度較低,也比較有效率。在相同的功率下,額定轉速越低的電動機可能會對應較大的框號[40]。
反向旋轉
异步电动机要調整轉向的方式,會隨三相异步电动机或是單相异步电动机而不同。對於三相异步电动机而言,對調任意二條電動機的接線即可以反轉。
若是單相分相电动机,改變主繞組及啟動電路之間的接線即可反轉。不過有些單相分相电动机是設計給特殊的應用,其主繞組及啟動電路已在內部連接,因此無法改變轉向。單相蔽極电动机有固定的轉向,除非將馬達拆下,將定子反向,不然無法改變轉向。
功率因數
異步電動機的功率因數會依負載而變化,在滿載時會到0.85至0.90,在無載時只有0.20[35],變化原因是定子及轉子的漏感以及磁化電抗[41]。若是異步電動機直接連接市電,或是經變壓器由市電供電。功率因數可以用並聯電容器的方式改善,可能是考慮單一電動機連結電容器,也可能是將許多電動機並聯,再共用功因電容器。因為經濟以及其他因素的考量,電力系統很少會將功因校正到恰好是1的功因[42]。 不過功因電容器有可能會產生諧波電流,需要進行電力系統的分析,以避免功因電容器、變壓器以及電路電抗之間的共振[43]。一般會建議用共用電源的功因修正,以避免共振風險,並且簡化電力系統分析[43]。
效率
滿載時电动机的效率約在85%至97%之間,电动机損失大約可以分為以下幾項[44]:
許多國家的監管機構已開始訂定相關法令,鼓勵製造商使用及生產效率較高的电动机。目前已有法令,強制未來在特定設備中使用超高效率(premium-efficiency)异步电动机,也有一些類似的法令正在規劃中。相關訊息可參考超高效率。
斯泰因梅茨等效電路
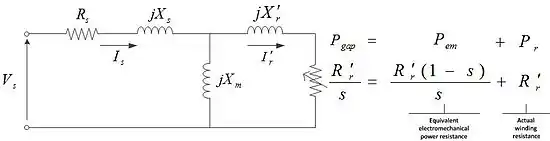
斯泰因梅茨(Steinmetz)等效電路也稱為T型等效電路,是描述异步电动机的電能輸入如何轉換為機械能輸出的數學工具,是IEEE建議的异步电动机等效電路,可以依此推導許多有關電流、電壓、速度、功因及轉矩之間的關係。等效電路會以單相來表示多相的异步电动机(在穩態平衡負載時可以用單相來近似)。
斯泰因梅茨等效電路可以表示為以下的成份:







根據阿尔热(Alger)所述,异步电动机可以表示為變壓器,其磁路是被定子繞組和轉子繞組之間的氣隙所隔開[26]。等效電路可以表示為由理想變壓器分隔開的定子電路及轉子電路,也可以將轉子部份轉換到定子側。以下的電路、方程式以及參數皆用後者的表示方式[35][42][45][46][47][48]。
| 電路參數定義 | ||
|---|---|---|
| 單位 | ||
| 定子同步頻率 | Hz | |
| 转子轉速(每分鐘轉速) | rpm | |
| 同步轉速(每分鐘轉速) | rpm | |
| 定子或一次側電流 | A | |
| 轉子或二次側電流,對應一次側的數值 | A | |
| 磁化電流 | A | |
| 虚数單位或是旋转90° | ||
| 戴维南電抗因數 | ||
| 馬達相數 | ||
| 馬達極數 | ||
| 电磁功率 | W or hp | |
| 氣隙功率 | W | |
| 轉子銅損 | W | |
| 輸入功率 | W | |
| 鐵損 | W | |
| 磨擦及風損 | W | |
| 輕載功率輸入 | W | |
| 雜散損 | W | |
| 定子或一次側電阻及漏電抗 | Ω | |
| 轉子或二次側電阻及漏電抗,對應一次側的數值 | Ω | |
| 電動機輸入的電阻及漏電抗 | Ω | |
| 戴维南等效電阻及漏電抗(包括及) | Ω | |
| 滑差 | ||
| 电磁轉矩 | Nm or ft.-lb. | |
| 崩潰轉矩 | Nm or ft.-lb. | |
| 定子相電壓 | V | |
| 激磁电抗 | Ω | |
| Ω | ||
| 定子或一次側阻抗 | Ω | |
| 轉子或二次側阻抗,對應一次側的數值 | Ω | |
| 電動機定子或是一次側輸入阻抗 | Ω | |
| 合併轉子(或二次側)以及激磁阻抗 | Ω | |
| 戴维南等效電路阻抗 | Ω | |
| 轉子角速度 | 弧度每秒 | |
| 同步角速度 | rad/s | |
| mho | ||
| Ω | ||









































- .

- 若不考慮定子電阻,异步电动机的轉矩曲線會簡化為Kloss方程[52]
- ,其中 是時的滑差。


| 基本電機公式 | ||
|---|---|---|
|
电动机輸入等效阻抗 定子電流 轉子電流,對應一次側的數值 | ||




| 功方程式 | ||
|---|---|---|
|
根據斯泰因梅茨等效電路,可得 氣隙功率等於電機功率加上轉子銅損 用轉子角速度表示電機功率輸出
將 用 ft.-lb表示:
| ||









| 轉矩方程 | ||
|---|---|---|
為了將用來表示,IEEE建議及 需轉換為戴维南等效電路 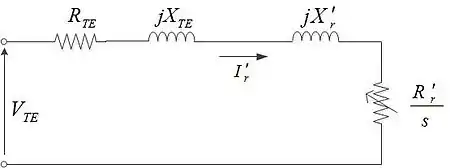 IEEE建議戴维南等效電路 其中 因為及,令
針對滑差較低時:
針對滑差較高時:
最大轉矩或是崩潰轉矩和轉子電阻無關
最大轉矩或是崩潰轉矩的滑差為 若用foot-pound的單位
| ||



















參考資料
- IEC 60050 (Publication date: 1990-10). Section 411-31: Rotation Machinery - General, IEV ref. 411-31-1: "Induction Machine - an asynchronous machine of which only one winding is energized". (页面存档备份,存于)
- Babbage, C.; Herschel, J. F. W. . Philosophical Transactions of the Royal Society. Jan 1825, 115 (0): 467–496 [2012-12-02]. doi:10.1098/rstl.1825.0023. (原始内容存档于2018-01-12).
- Thompson, Silvanus Phillips. 1st. London: E. & F.N. Spon. 1895: 261 [2012-12-02]. (原始内容存档于2016-11-14).
- Baily, Walter. . Philosophical Magazine (Taylor & Francis). 1879-06-28 [2019-02-13]. (原始内容存档于2016-12-01).
- Vučković, Vladan. (PDF). The Serbian Journal of Electrical Engineers. November 2006, 3 (2) [2013-02-10]. (原始内容存档 (PDF)于2013-07-04).
- Eugenii Katz. . People.clarkson.edu. [2009-08-04]. (原始内容存档于2008-06-25).
- Ricks, G.W.D. . Journal of the Institution of Electrical Engineers. March 1896, 25 (120): 57–77 [2019-02-13]. doi:10.1049/jiee-1.1896.0005. (原始内容存档于2016-03-11).
- Ferraris, G. . Atti della R. Academia delle Science di Torino. 1888, XXIII: 360–375.
- Alger, P.L.; Arnold, R.E. . Proceedings of the IEEE. 1976, 64 (9): 1380–1383. doi:10.1109/PROC.1976.10329.
- Froehlich, Fritz E. Editor-in-Chief; Allen Kent Co-Editor. First. New York: Marcel Dekker, Inc. 1992: 36 [2012-12-02]. ISBN 0-8247-2902-1. (原始内容存档于2008-05-29).
- The Electrical Engineer. . Volume II. London: Charles & Co. 1888-09-21: 239.
- Ferraris, Galileo. . Electrician. 1885, 36: 360–375.
- Tesla, Nikola; AIEE Trans. . AIEE. 1888, 5: 308–324 [2012-12-17]. (原始内容存档于2012-11-15).
- . [2019-02-17]. (原始内容存档于2017-05-10).
- . [2019-02-17]. (原始内容存档于2014-02-25).
- Klooster, John W. . Santa Barbara: ABC-CLIO. 2009-07-30: 305 [2012-09-10]. ISBN 978-0-313-34744-3. (原始内容存档于2016-11-18).
- Day, Lance. McNeil, Ian , 编. . London: Routledge. 1996: 1204 [2012-12-02]. ISBN 0-203-02829-5.
- Hubbell, M.W. . Authorhouse. 2011: 27 [2019-02-13]. ISBN 978-1463424411. (原始内容存档于2017-11-03).
- VDE Committee History of Electrical Engineering IEEE German Chapter. 13. January 2012 [2013-02-10]. (原始内容存档于2013-02-25).
- Kennelly, A. E. . Transactions of the American Institute of Electrical Engineers. Jan 1893, X: 172–232 [2019-02-17]. doi:10.1109/T-AIEE.1893.4768008. (原始内容存档于2014-11-06).
- Steinmetz, Charles Porteus. . AIEE Trans. 1897, XIV (1): 183–217 [2012-12-18].
- Banihaschemi, Abdolmajid. (PDF). Fredericton, N.B.: University of New Brunswick. 1973: 1, 5–8. (原始内容 (PDF)存档于2013-07-04).
- Steinmetz, Charles Proteus; Berg, Ernst J. . McGraw Publishing Company. 1897 [2019-02-17]. (原始内容存档于2016-03-08).
- . NSW HSC Online - Charles Sturt University. [2012-12-02]. (原始内容存档于2012-10-30).
- NEMA MG-1 2007 Condensed. . Rosslyn, Virginia US: NEMA. 2008: 29 (Table 11) [2012-12-02]. (原始内容存档于2013-01-31).
- Alger, Philip L.; et al. . Knowlton, A.E. (编). 8th. McGraw-Hill: 705. 1949.
- (PDF). Mississippi State University Dept of Electrical and Computer Engineering, Course ECE 3183, 'Electrical Engineering Systems for non-ECE majors'. [2012-12-02]. (原始内容 (PDF)存档于2016-05-15).
- . electricmotors.machinedesign.com. Penton Media, Inc. [2016-04-12]. (原始内容存档于2007-11-16).
- . elec-toolbox.com. [2013-01-01]. (原始内容存档于1999-05-08).
- Srivastava, Avinash; Kumar, Ravi. . Course notes (Malnad College Of Engineering).
- NEMA Standards Publication. . Rosslyn, Virginia US: NEMA. 2007: 6 [2012-12-02]. (原始内容存档于2008-04-28).
- Herman, Stephen L. 8th. US: Cengage Learning. 2011: 529–536. ISBN 1-111-03913-5.
- Peltola, Mauri. . Plantservices.com. [2012-12-18]. (原始内容存档于2021-11-22).
- Keljik, Jeffrey. . 9th. Clifton Park, NY: Delmar, Cengage Learning: 112–115. 2009 [2019-02-28]. ISBN 1-4354-0031-3. (原始内容存档于2014-03-02).
|chapter=被忽略 (帮助) - Liang, Xiaodong; Ilochonwu, Obinna. (PDF). IEEE Transactions on Industry Applications. Jan 2011, 47 (1): 271–280 [2012-12-04]. doi:10.1109/TIA.2010.2090848.
- Jamil Asghar, M.S. . Power Electronics and Drive Systems, 2003. The Fifth International Conference on. 2003, 2: 1037–1040. doi:10.1109/PEDS.2003.1283113.
- . Your Electrical Home. [2018-02-22]. (原始内容存档于2019-03-06).
- . BrainKart. [2018-02-22]. (原始内容存档于2019-03-07).
- Lendenmann, Heinz; et al. (PDF). [2012-04-18].
- ABB Group (Baldor Electric Company). (PDF): 6. 2016 [2016-10-04]. (原始内容 (PDF)存档于2016-11-23).
- Fink, D.G.; Beaty, H.W. 11th. McGraw-Hill. 1978: 20–28 thru 20–29.
- Jordan, Howard E. 2nd. New York: Plenum Press. 1994. ISBN 0-306-44698-7.
- NEMA MG-1, p. 19
- U.S. DOE. (PDF): 27. 2008 [2012-12-31]. (原始内容存档 (PDF)于2012-09-21).
- Hubert, Charles I. 2nd. Upper Saddle River, N.J.: Prentice Hall. 2002: Chapter 4. ISBN 0130612103.
- Beaty, H. Wayne (Ed.). (PDF). 3rd. New York: McGraw-Hill. 2006. ISBN 0-07-136298-3. (原始内容 (PDF)存档于2012-08-13).
- Knight, Andy. . Hosted by University of Alberta. [2012-12-21]. (原始内容存档于2013-01-15).
- IEEE 112. . New York, N.Y.: IEEE. 2004. ISBN 0-7381-3978-5.
- Alger (1949), p. 711
- Özyurt, Ç.H. (PDF). Middle East Technical University. 2005: 33–34 [2019-02-13]. (原始内容存档 (PDF)于2016-01-21).
- Knight, Andy. . Hosted by University of Alberta. [2012-12-31]. (原始内容存档于2012-11-29).
- Hameyer, Kay. (PDF). RWTH Aachen University Institute of Electrical Machines. 2001 [2013-01-11]. (原始内容 (PDF)存档于2013-02-10).page=133
- . Educational Foundation for Atomic Science. 1973-06-06 [2012-08-08].
腳註
- 鼠笼(Squirrel cage)是指其轉子外型類似飼養倉鼠時,供倉鼠運動的倉鼠輪
- 鼠笼式感應电动机不會有像通用電動機、直流電動機、同步電動機一樣,將能量從定子轉換到轉子的集電環、換向器、自激電路或他激電路
- 绕线式感應电动机的轉子透過集電環連接電阻,但也不會連接到定子
- NEMA MG-1定義 a) 崩潰轉矩(Breakdown torque)是電動機在額定頻率額定電壓下,沒有速度突然變化的情形下可產生的最大轉矩 b) 堵轉轉矩(locked-rotor torque)是電動機靜止,在額定頻率額定電壓的最小轉矩 c) 啟動轉矩(pull-up torque)是電動機從靜止到出現崩潰轉矩的過程中,所產生的最小轉矩
外部連結
| 维基共享资源上的相关多媒体资源:异步电动机 |
- An induction motor drawing (页面存档备份,存于)
- Rotating magnetic fields (页面存档备份,存于): interactive, (意大利文)
- Induction motor topics from Hyperphysics website hosted by C.R. Nave, GSU Physics and Astronomy Dept.
- Torques in Electrical Induction Motors (页面存档备份,存于) on Engineering ToolBox
{kind=link}
{kind=link}