直流有刷馬達
直流有刷馬達是內部有整流子(換相器)的电动机,可以由直流電供電運動。直流有刷馬達可以將電能轉換為動能,而且所需的直流電源已當時普遍使用在商用及工業大樓中,因此是早期商品化的重要電器設備。直流有刷馬達可以用調整工作電壓或是磁場強度的作法來改變其轉速。依照磁場繞組供電方式的不同,直流有刷馬達的速度轉矩特性可以調整為定速度特性,或是速度和負載成反比的模式。直流有刷馬達會使用在電力推進系統、吊車、造紙機及軋鋼廠中。由於直流有刷馬達中的電刷會磨損,需要定期保養更換,隨著电力电子学的發展,直流無刷電動機已在許多應用中取代了直流有刷馬達。
结构
直流有刷馬達的基本構造包括电枢、場磁鐵、集電環和電刷。
簡易兩極直流馬達的原理
下圖是簡易二極有刷直流馬達的原理。
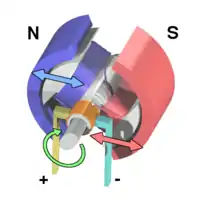
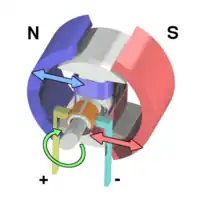


若繞在軟磁性材料上的線圈,其中有電流流過,又放在外加磁場下,依弗萊明左手定則,線圈一端的導線會受一個和磁場和電流垂直的力,另一端的導線則會受一反方向的力。這二個力會使線圈旋轉。若要讓線圈持續往同一方向旋轉,若針對二極馬達,每旋轉半圈時,線圈上的直流電需改變方向,使線圈繼續往同一方向旋轉。
上述馬達的一個問題是出現在線圈和磁場平行的情形下,也就是定子和轉子差90度的情形下,此時的力矩為零。在上圖中,左側第二圖即為線圈和磁場平行的情形。馬達轉子若在此位置,無法啟動運轉。不過只要馬達開始運轉,通過此位置時,會因為轉子的慣性而使馬達繼續運轉。
這種二極的設計還有另一個問題。在零轉矩的位置,二個整流電刷會同時碰觸到二個換相片(commutator plates),造成短路。電源線會因為換相片而短路,而線圈也會因為電刷而在短路路徑中。(上述零力矩的問題和此問題無關,就算短路時線圈通過大電流,產生的力矩仍然是零。)此處短暫的短路無法產生動力。若是電池供電,低電流的應用,問題可能還不大。但若二極馬達的功率到達數百瓦,短路可能會讓整流子嚴重過熱,若電刷是金屬的,甚至可能讓電刷熔化。若使用碳刷,就不會有熔化的問題。而這樣的短路在電力上是種浪費,一方面會讓電池的電快速耗盡,而供電線路不能只考慮馬達正常運轉需要的電流,也需考慮短路的電流。

有關避免短路的問題,有個簡單的處理方式,是讓二個換相片之間的間隙比電刷之間的間隙要大。這會增加在轉動時零力矩的比例,但可以避免短路的問題。而且在此修改外,只要讓馬達固定在零力矩的位置,不讓它轉動,即可有效的讓馬達停止。在自製的業餘馬達中仍可看到這種設計。此作法明顯的有個缺點:馬達在旋轉時,每一圈會固定有二小段時間沒有力矩,其輸出力矩是脈動力矩。若用在電扇或是飛輪上,問題不大,但在許多應用中是完全不合適的,例如像錄音機的驅動馬達,需要定速轉動的設備,或是常常需要快速加減速的設備。另外一個缺點是線圈的电感很大,上面的電流不允許瞬間的變化。其電流可能會從換相片和電刷之間的間隙跳火,因此產生電弧。
就算在電扇和飛輪的應用中,也有一個缺點:馬達在一些特定位置(零力矩點)無法自行啟動,因此這種馬達不太適合實際的使用。實務上直流馬達的轉子不只二極,因此可以在任意位置下啟動,不會有力矩為零的位置,不論在哪個位置,流經線圈的電流都可以產生力矩。許多玩具和小型電器中常見的直流有刷馬達,也是最簡單的量產直流馬達,其電樞繞組是三極的。電刷可以跨接二個相鄰的換相片,不會造成短路。三極繞組的另一個優點是電刷上的電流可能是透過二個繞組或是一個繞組。若啟動時,某一繞組的電流是標準值的一半(此繞組和另一繞組並聯),其電流會上昇到其標準值,再降至其標準值的一半,接下來電流量值有類似的變化,但符號由正變負。這個階梯狀的電流比較接近弧波,其力矩變化也會比二極轉子的馬達(每一相的電流比較接近方波)。其電流變化較小,因此比較不會有電刷產生電弧的情形。
若直流馬達的軸因為外力而轉動,直流馬達會類似發電機,產生電動勢(EMF)。在正常運作下,馬達轉動時會產生電壓,稱為反电动势(CEMF)。馬達在靜止時其電阻很小,但在馬達旋轉時,給相同的電壓,其電流會小於靜止時的電流,就是因為反电动势的影響。因此,馬達上的壓降除了電阻的壓降外,還有反电动势及雜散電壓降。其電流的方程式如下:

馬達產生的機械功如下:

若無載的直流馬達旋轉,會產生一個電動勢,避免電流繼續增加。在轉速上昇時其電流會繼續下降,因此自由旋轉的馬達其電流很小。馬達在有負載時,其電流才會上昇。
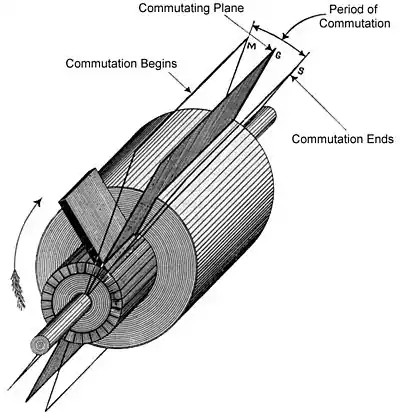
換相面
在電滾子(dynamo)中,穿過一對電刷的接觸面中心,和電樞旋轉軸平行的平面稱為「換相面」(commutating plane)。圖中只繪出換相面和一個電刷之間的關係,假設另一側旳電刷也以類似和方式和換相面接觸。
 |
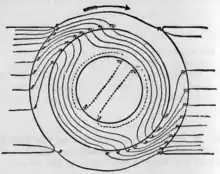
定子磁場扭曲的補償
真實電滾子的磁場不均勻。在轉子旋轉時會引發磁場的效應,會使牽引定子的磁力線,使其扭曲。
 定子磁場受轉子影響的示意圖,有誇大其影響程度 |
 由鐵屑可以看出轉子上的扭曲磁場 |
轉子旋轉的越快,磁場扭曲的情形就越嚴重。若讓轉子磁場和定子磁場垂直,運作的效率最高,因此需要調整電刷的位置讓轉子磁場和扭曲後的扭曲磁場成直角。
 若沒有扭曲效應時,的換相面位置
|
 有扭曲效應時的真實換相面位置 |
若轉子轉向相反,其磁場效應也會相反,其真實換相面位置也會不同,因此很難製作高效率、可反轉的換相電滾子。
這個效果類似內燃機中的點火正時。一般而言電滾子會設定在以固定轉向以及速度旋轉,因此其電刷會固定在該轉向和轉速下最大效率的位置[1]。
繞線定子的直流馬達會用換相場繞組和補償繞組來補償磁場的扭曲。
設計上分類
直流有刷馬達轉子是由繞組組成,定子可能是繞組,也可能是永久磁鐵。
繞線定子

- A, 並激式
- B, 串激式
- C, 複激式
- f, 場繞組
場繞組有四種基本的型式:他激(sepex)、串激式繞組(Series)、並激式繞組(shunt),以及合併串激和並激的複激式(compound)繞組。
他激(励)式馬達中,励磁绕组与电枢没有电的联系,励磁电路是由另外直流电源供给的,因此励磁电流不受电枢端电压或电枢电流的影响。會用在直流牽引電動機,以控制車輪滑轉。
并激(励)式馬達中,并励绕组两端电压就是电枢两端电压,但是励磁绕组用细导线绕成,其匝数很多,因此具有较大的电阻,使得通过他的励磁电流较小。負載增加時,扭力增加,轉速不太受影響。
串激(励)电动机中,励磁绕组是和电枢串联的,所以这种电动机内磁场随着电枢电流的改变有显著的变化。为了使励磁绕组中不致引起大的损耗和电压降,励磁绕组的电阻越小越好,所以直流串励电动机通常用较粗的导线绕成,其匝数较少。串激式電動機在負載增大時,扭力增大但轉速減慢。
複激式馬達具有並激式和串激式的特性,大起動扭力及較穩定轉速。
永久磁鐵馬達
永久磁鐵定子的馬達,其性能比直流馬達、激磁馬達或同步電動機都好,是分數馬力應用中常用的馬達。永久磁鐵馬達和其他單饋電機比較,永久磁鐵馬達體積較小、較有效率,可靠度也比較高[2]。
一開始大型的工業直流馬達會用定子繞組馬達,或是轉子磁鐵馬達。因為很難找到可以維持高磁場強度的材料,因此以往永久磁鐵馬達只會用在小功率的應用中。近來材料科學的進步,已可以製造高強度的永久磁鐵(例如釹磁鐵),因此可以開發小型高功率的馬達,不需要大體積的場繞組以及激磁元件。不過隨著高性能的永久磁鐵越來越多的應用在馬達和發電機系統中,也開始出現其他的問題。
軸向磁場馬達
傳統直流有刷馬達的磁場是徑向的,會和馬達的旋轉軸交叉。不過也有一些馬達的設計是讓磁場和旋轉軸平行,轉子在旋轉時會切割磁場。因此可以有較強的磁場(特別是用海爾貝克陣列的磁鐵排列方式時)。這可以讓馬達在低速時有較大的功率輸出。不過其集中的磁通密度會受到殘留磁通密度的限制,而且磁芯飽和的磁通密度是主要的設制限制。
速度控制
一般而言,直流馬達的轉速和繞組的電動勢(加在繞組上的電壓減去本身的電阻壓降)成正比,其力矩和電流成正比。速度控制可以用調整電池、調整電源電壓、電阻或是電子控制的方式達成。有一些速度控制相關的模擬[3][4]。繞線場繞組直流馬達的轉向可以用將場繞組或電樞電流反向(但不能兩者都反向)的方向來達成。電流反向的電路可以用特殊的继电器來達成。等效電壓可以用串聯電阻來調整,或是用晶閘管、晶体管或水銀整流器製成的控制設備來調整[5]。
串並聯
在电力电子学技術問世之前,串並聯控制是鐵路牽引電動機控制的標準作法。電力機車上有四顆馬達,可以用以下的三種方式接線:
- 所有的馬達串聯(馬達端電壓是線電壓的四分之一),其轉速最低。
- 二個馬達串聯,最後再將二組馬達並聯(馬達端電壓是線電壓的一半)。
- 所有馬達並聯(馬達端電壓是線電壓),其轉速最高。
上述都是假設馬達是運行在最小電阻損失的速度。若是在啟動或是加速,需要用電阻進行額外的控制,若用電子控制系統,即可不用用電阻進行額外的控制。
弱磁控制
弱磁(field weakening)控制是提昇馬達轉速的方式。直流馬達的弱磁控制可以用在並激場繞組中串聯電阻,或是在串激繞組中增加電阻來達到,都可以降低場繞組的電流。若磁場降低,反電動勢也會降低,因此電樞繞組可以通過較大電流,使速度增加。直流馬達的弱磁控制一般會配合其他控制方式(例如串並聯控制)使用。
斩波器
在斩波器電路中,會快速的切換提供給馬達的電壓,來調整給馬達的平均電壓。斩波器會調整輸出導通和關斷的時間比例,以調整給馬達的平均電壓,馬達的轉速也會隨之變化。導通時間的比例乘以供電電壓,即為給馬達的平均電壓。例如供電電壓100V,導通時間佔25%,馬達的平均電壓即為25V。在輸出關斷時,電樞的電感會讓電流持續導通,因此開關上需要和開關並聯的飛輪二極體,在此情形下讓電流導通,此時供電電流為0。若輸出導通佔比是100%,馬達電流等於供電電流。快速切換會產生切換損失,但是比串聯電阻產生的損失要小。此方式也稱為是脈衝寬度調變(PWM),會用微處理器實現。有時會在輸出端加裝滤波器,使輸出的平均電壓比較平緩,也可以減少馬達線上的雜訊。
串激繞組的直流馬達在低速時有最高的轉矩,常用在牽引電動機的應用(例如鐵路機車及有軌電車)。另外一種應用是汽油引擎和柴油引擎車輛的起動馬達。若馬達有可能會無載運轉(例如皮帶驅動),不能使用串接繞組馬達。馬達加速時,其電樞電流(和磁場電流)會下降。磁場下降也再讓馬達加速,因此形成正回授,最後會讓馬達損壞,若是直接驅動風扇冷卻的馬達,比較不會有這類的問題。在鐡路應用上,因為車輪可能會暫時離開鐵軌,失去附著力,這可能會造成問題,除非很快可以重新控制馬達,否則馬達的速度會上昇到相當高的速度。這不會會損害馬達和齒輪,因為車輪和鐵軌的速度差,使其快速加熱和冷卻,也會破壞車輪和鐵軌。有些應用會用電子控制導入弱磁控制,以增加馬達的速度。最簡單的作法是用接觸器和弱磁電阻。利用電子控制監控馬達電流,當電流小於設定值時(此時,馬達在設計轉速)串接弱磁電阻。此時的轉速會超過額定轉速。當馬達電流增加時,接觸器會切斷弱磁電阻,讓馬達回到正常的轉速。
Ward Leonard
Ward Leonard控制可以控制並激型或複激式的直流馬達,而且可以在交流電源下控制直流馬達的速度(若在直流電源的架構,也是有類似的好處)。會由交流電源來驅動交流馬達(多半會是感應馬達),交流馬達會驅動直流發電機。繞組的直流輸出直接接到直流馬達電樞繞組(有時會是在相同架構下,不過也有例外)。直流發電機和直流馬達的場繞組會個別用可變電阻進行控制。透過調整發電機場電流和馬達場電流,可以從馬達靜止到全速範圍內都有精準的速度控制,而且可以有定轉矩。自Ward Leonard控制問世之後,這就是馬達控制的業界標準,一直到晶閘管電力電子系統問世後,才被電力電子系統取代。當時只要是需要良好速度控制的應用,都會用Ward Leonard控制,從載人電梯到大型礦井井上繞組設備,甚至是工業過程設備以及電動吊車等。Ward Leonard控制的主要缺點是其架構至少需要三台電機(馬達和發電機),若是非常大型的應用,直流發電機和直流馬達會配兩組,再串聯可變電阻控制,因此會需要五台電機。在許多的應用中,馬達—發電機組會持續運轉,以避免需要用電時才讓馬達加速,因而造成的時間延遲。小型到中型的Ward Leonard控制器已被晶閘管電力電子系統取代,但有些數千馬力的Ward Leonard控制器仍在運作。其場電流遠小於電樞電流,因此可以用小型的晶閘管控制,此方式控制的馬達功率會比直接用晶閘管控制的馬達功率要大的多。例如在某個應用中,控制發電機場電流的晶閘管額定只需要300A,但發電機產生的電流超過15,000 A,若直接用晶閘管控制,不但價格昂貴,而且也沒有效率。
直流馬達的轉矩和轉速
直流电动机的轉速和力矩會依其激磁方式而不同。會依照負載的不同,選擇他激場繞組、自激場繞組或是永久磁鐵激磁來控制馬達。自激場繞組的馬達,其場繞組也可以用並激式、串激式或是複激式。
基本特性
定義


轉矩和轉速特性
並激繞組式馬達
並激式馬達的高電阻(場繞組)和電樞並聯,Vm, Rm和Ø都是定值,因此從無載到滿載的速度變化率(speed regulation)最少會大於5%[16]。速度控制的方式有以下三種[17]:
- 改變場電壓
- 弱磁
- 改變場繞組上的電阻
串激繞組式馬達
串激繞組式馬達在負載變大時其轉速會降低,電流增加,因為電流同時流到電樞和場繞組,轉矩會和電流的平方成正比。馬達堵轉時,其電流只受繞組本身的電阻所限制,因此轉矩會相當高,但有繞組過熱的風險。串激繞組式馬達以往常用在各種鐵路運輸的牽引電動機[18],不過後來已被逆變器驅動的交流异步电动机所取代。馬達電樞繞組上的反電動勢和其電阻可以限制流經電樞的電流。馬達剛送電啟動時,電樞靜止未旋轉,反電動勢是零,此時只靠電樞電阻來限制電流[19]。可預期的,此時通過電樞的電流會很大,因此在啟動時需要額外的電阻和電樞串聯來限制電流,直到電樞已旋轉,可產生反電動勢為止。若馬達已開始加速運轉,就可以逐漸的將電阻切離。
串激繞組式馬達的最大特點是其轉速和需要驅動負載的轉矩有關。這適合驅動大慣量的負載,因為在加速時會需要最大轉矩,當開始加速後其轉矩就可以慢慢減少。
串激繞組式馬達在無載時的速度可能會非常快,甚至會快到會造成危險的程度,因此串激繞組式馬達多半會直接驅動負載,或是用齒輪連接負載[20]。
永久磁鐵馬達
永久磁鐵直流馬達的特性是堵轉轉矩(stall torque,軸靜止時的最大轉矩)和軸上沒有負載時的無載轉速之間的線性關係。[21]
保護
要延長直流馬達的壽命,可以使用保護裝置[22]以及电机控制器來避免馬達的機械損壞、過度潮濕、電擊穿、高溫或是熱過載[23]。保護設備會感測馬達的異常條件[24],並且產生警報提醒操作者,或是在故障發生時自動將馬達斷電。馬達的過載可以用熱過載继电器來保護。有些馬達在繞組中嵌有雙金屬過載继电器,在溫度過高時,雙金屬帶會往不同方向偏折,使電路及馬達開路。加熱器是外加的熱過載保護器,串聯在馬達繞組上,裝在馬達的接触器上。當過電流時接點會熔化,使馬達電路開路。雙金屬加熱器的效果類似嵌入式雙金屬保護器。保險絲及斷路器可以保護過電流或是短路。接地故障繼電器也可以用來作接地短路保護。接地故障繼電器會監控馬達繞組電流以及接地系统電流。若在馬達-發電機組中,會有反向電流繼電器避免電池放電,反而發動發電機旋轉。直流馬達若喪失磁場,可能會造成有危險性的速度過高失控(runaway),因此會將失磁電驛(loss of field relays)[25]和馬達場繞組並聯以感測場電流。若場電流低於一定值,電驛會切斷馬達的電樞電路。轉子鎖死的條件會讓馬達在開始啟動程序後無法加速運轉。距離繼電器可以避免類似情形。低壓馬達保護一般會整合到馬達控制器或是緩啟動器中。此外,針對電壓突波或是浪涌電流(surges)可以用隔離變壓器、電力穩壓器、壓敏電阻、突波保護器及諧波濾波器來保護。
環境條件(像是灰塵、爆炸性蒸氣、水、高周溫等)都會對直流馬達的運行有負面影響。為了要保護馬達,美國電氣製造商協會(NEMA)和國際電工委員會(IEC)都已將馬達的外殼標準化[26],針對保護馬達不受這些污染來進行設計。在馬達設計階段也會使用電腦軟體(例如Motor-CAD來提昇馬達的熱效率。
參數和狀態估測
有許多研究在估測馬達的參數,作法包括有傳統以模型為主的估測器,例如擴展卡爾曼濾波(EKF)[27][28]和Luenberger觀測器[29],也有使用智慧型的估測器,例如級聯前饋神經網路(cascade-forward neural network、CFNN)及準牛頓BFGS反向傳播(quasi-Newton BFGS backpropagation)[30]。
腳註
- Hawkins Electrical Guide
- Gottlieb, I.M. 2nd. TAB Books. 1994.
- . [2021-04-07]. (原始内容存档于2018-02-09).
- . [2021-04-07]. (原始内容存档于2018-02-09).
- Lander, Cyril W. . 3rd. London: Mc Graw Hill International UK. 1993. ISBN 0-07-707714-8.
- Neville, S.: 'Use of Carter's coefficient with narrow teeth', Proceedings of the Institution of Electrical Engineers, 1967, 114, (9), p. 1245-1250
- Hameyer, p. 66, eq. 5-3437
- Lynn, §8-144, p. 826, eq. 8-17
- Hameyer, p. 66, eq. 5-20
- Lynn, §8-146, p. 826, eq. 8-18
- Hameyer, p. 66, eq. 5-23
- Lynn, §147, p. 827, eq. 8-21
- Lynn, §8-147, p. 827, eq. 8-20
- Hameyer, p. 68, eq. 5-31
- Lynn, §147, p. 827, eq. 8-22
- Lynn, §8-148 to §8-151, p. 827-828
- Hameyer, p. 69
- Alger, §7-278, p. 757
- Alger, §7-277, p. 757
- Lynn, §8-154, p. 828
- MIT CIPD
- Herman, Stephen L. Electric Motor Control. (页面存档备份,存于) 9th ed. Delmar, Cengage Learning, 2009. Page 12.
- Malcolm Barnes. Practical variable speed drives and power electronics. (页面存档备份,存于) Elsevier, Newnes, 2003. Page 151.
- J. Lewis Blackburn. Protective relaying: principles and applications. (页面存档备份,存于) CRC Press, 1998. Page 358.
- Ohio Electric Motors. DC Motor Protection.Ohio Electric Motors. 2011. (页面存档备份,存于)
- H. Wayne Beaty and James L. Kirtley. Electric Motor Handbook. (页面存档备份,存于) McGraw-Hill Professional, 1998. Page 97.
- Pantonial, Roel; Kilantang, Alan; Buenaobra, Bernardino. . TENCON 2012 IEEE Region 10 Conference. November 2012: 1–6. ISBN 978-1-4673-4824-9. S2CID 25418197. doi:10.1109/TENCON.2012.6412194.
- Acarnley, P.P.; Al-Tayie, J.K. . IEE Proceedings - Electric Power Applications. January 1997, 144 (1): 13–20 [2021-04-27]. ISSN 1350-2352. doi:10.1049/ip-epa:19970927. (原始内容存档于2020-08-08).
- NESTLER, H.; SATTLER, PH K. . Electric Machines & Power Systems. 1993-01-01, 21 (1): 39–50. ISSN 0731-356X. doi:10.1080/07313569308909633.
- Mellah, Hacene; Hemsas, Kamel Eddoine; Taleb, Rachid; CECATI, carlo. . Turkish Journal of Electrical Engineering & Computer Sciences. 2018, 26 (6): 3182–3192. S2CID 69944028. arXiv:1902.03171
 . doi:10.3906/elk-1711-330.
. doi:10.3906/elk-1711-330.
書目
- Alger, P. L. . Knowlton, A.E. (编). 8th. McGraw-Hill: 826–831. 1949.
- Hameyer, Kay. . . RWTH Aachen University Institute of Electrical Machines. 2001.
- Lynn, C. . Knowlton, A.E. (编). 8th. McGraw-Hill: 826–831. 1949.
- MIT CIPD. . . MIT, Mech. Engineering, CIPD. 2009 [2008-12-11]. (原始内容存档于2021-04-22).