莫爾圓
莫爾圓(Mohr's circle)得名自德國土木工程師克里斯汀·奧圖·莫爾,是一種用二維方式表示柯西应力张量轉換關係的圖。
先針對假設為連續的物體進行應力分析,之後特定一點的柯西应力张量分量會和坐標系有關。莫爾圓是用圖形的方法去確認一個旋轉坐標系上的應力分量,也就是在同一點上,但是作用在不同方向平面上的分量。
圓上每一個點的橫坐標及縱坐標都是在這個旋轉坐標系統上某一個方向的正應力及剪應力。換句話說,莫爾圓表示了在所有方向平面上應力狀態的軌跡,而X軸和Y軸為應力元素的主軸。


卡爾·卡爾曼是第一個想到用圖形來表示應力的人,他是在分析水平樑承受彎曲時的縱向應力及垂直應力時所想到的。莫爾的貢獻不止是用莫爾圓表示二維及三維的應力,他也根據莫爾圓發展了結構失效判定的準則[1]。
其他表示應力狀態的方式有拉梅應力橢球及柯西應力二次曲線(Cauchy's stress quadric)。
應力及莫爾圓
考慮一個會變形的物體(假設為連續體),若受到外力(可能是表面力或是物體力),物體的內部就會有力的分布。物體內部的力會依循歐拉運動定律,正如物體受力依循牛頓運動定律一様。物體內部力的強度可以用應力來表示。因為物體假設為連續體,其內部的力也是會均勻分佈在其體積中。
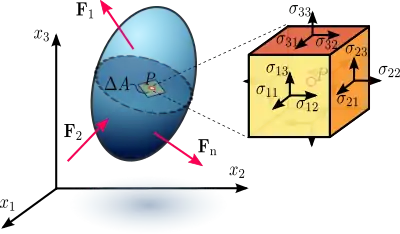
在工程中(例如結構工程、機械工程或土力工程)會透過應力分析來分析一物體中應力的的分佈,例如隧道中岩石的應力,飛機機翼的應力,或是建築物中樑柱的應力等。計算應力分布也就表示要知道物體中每一點的應力。據奧古斯丁·路易·柯西的理論,(假設為連續體的)物體中任何一點的應力(圖2),可以完全由二階(2,0)型的張量中的九個應力元素 完全決定,此二階張量稱為柯西应力张量, :


![{\displaystyle {\boldsymbol {\sigma }}=\left[{\begin{matrix}\sigma _{11}&\sigma _{12}&\sigma _{13}\\\sigma _{21}&\sigma _{22}&\sigma _{23}\\\sigma _{31}&\sigma _{32}&\sigma _{33}\\\end{matrix}}\right]\equiv \left[{\begin{matrix}\sigma _{xx}&\sigma _{xy}&\sigma _{xz}\\\sigma _{yx}&\sigma _{yy}&\sigma _{yz}\\\sigma _{zx}&\sigma _{zy}&\sigma _{zz}\\\end{matrix}}\right]\equiv \left[{\begin{matrix}\sigma _{x}&\tau _{xy}&\tau _{xz}\\\tau _{yx}&\sigma _{y}&\tau _{yz}\\\tau _{zx}&\tau _{zy}&\sigma _{z}\\\end{matrix}}\right]}](../I/150f0bb6d0473b0cc572e736e3f0c61ae490cf0e.svg)
若確定了一物體在特定坐標系統下的應力分佈,有可能需要知道特定一點相對另一個有旋轉的坐標系統下的應力張量,也就是在需要關注的點,在特定角度下的的應力張量。而此坐標系統和原有的坐標系統之間有一個角度差(圖3)。例如,一般會需要知道最大的正向應力以及最大的剪應力,也需要知道其對應的方向。因此,需要發展一種張量轉換的方式,可以配合坐標系統的旋轉得到新坐標系統的張量。依照張量的定義,柯西应力张量遵守張量轉換定律。應力的莫爾圓是用圖解方式來說明柯西应力张量轉換定律的方式。



二維張量下的莫爾圓

在二維下,一點相對于垂直方向的應力張量可以用三個應力向量完全表示。在垂直坐標系統下,其應力分量為:法向應力及,以及剪應力。由於角動量守恆,柯西應力張量會有對稱性,也就是,因此柯西應力張量可以寫成:




![{\displaystyle {\boldsymbol {\sigma }}=\left[{\begin{matrix}\sigma _{x}&\tau _{xy}&0\\\tau _{xy}&\sigma _{y}&0\\0&0&0\\\end{matrix}}\right]\equiv \left[{\begin{matrix}\sigma _{x}&\tau _{xy}\\\tau _{xy}&\sigma _{y}\\\end{matrix}}\right]}](../I/946034030fac5e3d547e35f94ac672ed9dbc87d2.svg)
其目的是在另一個通過點,但存在角度差的坐標系統下,找到應力分量及(圖4)。坐標系統和原坐標系統的角度差即為。

莫爾圓的方程
要推導二維平面應力及平面應變的莫爾圓方程,先考慮一個位在位置的二維的無限小方形元素(圖4),和-平面平行。


利用無限小元素上的力平衡,正向應力及剪應力的大小為:


莫爾圓參數式的推導-利用力平衡 利用方向(軸)的力平衡(圖4),而且假設 作用的面積為,可得: 再考慮以下的關係
- 及
可以得到
再考慮方向(軸)的力平衡(圖4),再假設 作用的面積是,可得:
再考慮以下的關係
- 及
可以得到








上述二個方程也可以用柯西應力張量的張量變換定律來求得,這和在及方向用力平衡計算是等效的。
莫爾圓參數式的推導-利用張量變換 應力張量變換定律可以表示為 將等號右側展開,再配合及,可得:
再加上以下的條件
- 及
可得
再加上以下的條件
- 及
可得
此時不需要計算垂直的應力成份,因為在推導莫爾圓時還不需要此成份
![{\displaystyle {\begin{aligned}{\boldsymbol {\sigma }}'&=\mathbf {A} {\boldsymbol {\sigma }}\mathbf {A} ^{T}\\\left[{\begin{matrix}\sigma _{x'}&\tau _{x'y'}\\\tau _{y'x'}&\sigma _{y'}\\\end{matrix}}\right]&=\left[{\begin{matrix}a_{x}&a_{xy}\\a_{yx}&a_{y}\\\end{matrix}}\right]\left[{\begin{matrix}\sigma _{x}&\tau _{xy}\\\tau _{yx}&\sigma _{y}\\\end{matrix}}\right]\left[{\begin{matrix}a_{x}&a_{yx}\\a_{xy}&a_{y}\\\end{matrix}}\right]\\&=\left[{\begin{matrix}\cos \theta &\sin \theta \\-\sin \theta &\cos \theta \\\end{matrix}}\right]\left[{\begin{matrix}\sigma _{x}&\tau _{xy}\\\tau _{yx}&\sigma _{y}\\\end{matrix}}\right]\left[{\begin{matrix}\cos \theta &-\sin \theta \\\sin \theta &\cos \theta \\\end{matrix}}\right]\end{aligned}}}](../I/c98aac6cba73c966e89d772397263f69ee507e4d.svg)






這二個方程是莫爾圓的參數式。在方程中,為參數,而和為坐標,因此表示若選擇適當的坐標系統,使為橫軸,縱軸,給定參數,會給定在莫爾圓上的一點。

若從參數式中消去參數,可以得到非參數式的莫爾圓方程。可以用重組及的方程來達到。先將第一式等號右側的第一項移到等號左邊,二式平方後相加,可得
![{\displaystyle {\begin{aligned}\left[\sigma _{\mathrm {n} }-{\tfrac {1}{2}}(\sigma _{x}+\sigma _{y})\right]^{2}+\tau _{\mathrm {n} }^{2}&=\left[{\tfrac {1}{2}}(\sigma _{x}-\sigma _{y})\right]^{2}+\tau _{xy}^{2}\\(\sigma _{\mathrm {n} }-\sigma _{\mathrm {avg} })^{2}+\tau _{\mathrm {n} }^{2}&=R^{2}\end{aligned}}}](../I/2774a663ddaa56d3418815d5a7d05fcf456d6f12.svg)
其中
![{\displaystyle R={\sqrt {\left[{\tfrac {1}{2}}(\sigma _{x}-\sigma _{y})\right]^{2}+\tau _{xy}^{2}}}\quad {\text{and}}\quad \sigma _{\mathrm {avg} }={\tfrac {1}{2}}(\sigma _{x}+\sigma _{y})}](../I/6a7f5d5e3408c2d465f9e463c5576810f83d2401.svg)
這就是圓(莫爾圓)的方程

在坐標系統中,其半徑,圓心在坐標處。



符號體系
在使用莫爾圓時,需考慮兩組分別的符號體系,一個是針對實體空間下應力分量的符號體系,另一個是針對「莫爾圓空間」下應力分量的符號體系。此外,工程力學(結構工程及機械工程)文獻用的體系和地質力學用的符號體系不同。沒有所有系統都適用的標準符號體系,是否要使用特定的符號體系取決於計算及詮釋特定問題的方便程度。
上述圖4的莫爾圓推導都是使用工程力學的符號體系,以下也會繼續使用工程力學的符號體系。
實體空間符號體系
為了描述柯西應力張量的方便(圖3及圖4),應力分量的第一個下標表示應力分量作用的面,第二個下標表示應力分量的方向。因此是作用在以軸正向為其法向量的平面上,而方向是往軸的正方向。

在實體空間符號體系,正的正向應力是由作用平面往外(張力),負的正向應力是由作用平面往內(壓縮力)(圖5)。
在實體空間符號體系中,正剪應力在法向量為正的材料元素平面上,其作用方向會往軸的正方向,同樣的,正剪力在法向量為負的材料元素平面上,其作用方向會往軸的負方向。例如作用在正向平面的剪應力和為正,因為這二個剪應力的作用方向往軸及軸的正方向(圖3)。而相對應的作用在負向平面的剪應力和,其作用方向往軸及軸的負方向,因此這二個剪應力也為正。

莫爾圓空間符號體系

在莫爾圓空間符號體系中,應力的符號體系和實體空間符號體系中的相同:正的正向應力是由作用平面往外(張力),負的正向應力是由作用平面往內(壓縮力)
不過剪應力的符號體系和實體空間符號體系中的不同。在莫爾圓空間符號體系中,正的剪應力會使材料往逆時針方向旋轉,而負的剪應力會使材料往順時針方向旋轉。因此在莫爾圓空間中,剪應力分量為正,而為負。這和實體空間符號體系中和符號相同的情形不同。
在繪製莫爾圓時,有二個作法可以繪製在數學上正確的莫爾圓:
- 將正的剪應力畫在上方(圖5,符號體系#1)
- 將正的剪應力畫在下方,也就是軸倒置(圖5,符號體系#2)
將正的剪應力畫在上方會讓莫爾圓上的角為正值時,旋轉方向是順時針旋轉,這和實體空間符號體系中的相反。因此有些作者[2]會選擇讓正的剪應力畫在下方,這會讓莫爾圓上的角為正值時,旋轉方向是逆時針旋轉,類似實體空間符號體系的情形。
為了克服剪應力軸往下才是正向的問題,有另外一種「替代的」符號體系,其中正的剪應力假設為將材料將順時針方向旋轉,而負的剪應力假設為將材料將逆時針方向旋轉(圖5,符號體系#3)。在「替代」體系下,正的剪應力軸往上,而且在莫爾圓上為正值時,旋轉方向為逆時針。此符號體系產生的莫爾圓和圖5,符號體系#2中的相同,因為正的剪應力也是會逆時針旋轉的剪應力,也畫在下方。而負的剪應力也是會順時針旋轉的剪應力,也畫在上方。
此條目在實體空間符號體系中,會依照工程力學的符號體系,而在莫爾圓空間中,會使用「替代的」符號體系(圖5,符號體系#3)。
繪製莫爾圓
.svg.png.webp)
在應力分析後,可以找到材料中一點上的應力分量、及。應力分量作用在二個互相垂直的平面及平面,兩者都通過點。莫爾圓上點和 點的坐標是在平面及平面上的應力分量。因此可以用莫爾圓找到應力分量及,也就是在同一點上,但作用在其他平面上的應力分量。線和線之間的夾角是通過點的平面和平面的法向量的夾角





假設已知待研究物體上的點的應力分量、及,如圖4所示。以下方法可以繪製點的莫爾圓,以表示其應力狀態。
- 繪制笛卡爾坐標系統,橫軸為,縱軸為。
- 在空間中,畫出二點及,分別是作用在二垂直平面平面和 平面上的應力分量(圖4及圖6),需依照選擇的符號體系。
- 用線段連接點和點,此即為圓的直徑。
- 繪製莫爾圓,其圓心是線段的中點,也就是此線和軸的交點。




找主要正向應力
主要應力的大小是點和點(圖6中圓和 軸的交點)中的橫坐標。最大正向應力的大小恆為這二個橫坐標中最大的那一個,而最小正向應力的大小恆為這二個橫坐標中最小的那一個。這二個點的縱坐標為0,對應在主要平面上的剪應力為零,主要應力的大小也可以表示為






其中平均正向應力的大小是圓心的橫坐標,為


其半徑的長度為

![{\displaystyle R={\sqrt {\left[{\tfrac {1}{2}}(\sigma _{x}-\sigma _{y})\right]^{2}+\tau _{xy}^{2}}}}](../I/cb62b3753948e2c8cbcc4b054de4f34d9630d711.svg)
找最大和最小剪應力
最大剪應力和最小剪應力對應圓上最大及最小的縱坐標。這二個點是圓和通過圓心的垂直線的交點。因此,最大和最小剪應力的大小為圓的半徑

找任意平面的應力分量
如前面所述,在二維應力分析後,可以知道在材料某一點上的應力分量、及 。這些應力分量作用在通過點的二垂直平面 及 ,如圖5及圖6所述。莫爾圓也可以計算在莫爾圓上的應力分量及,事實是作用在平面上,此平面也通過點,和平面有夾角,計算應力分量有二種方式:倍角法以及平面原點法(origin of planes)
倍角法
如圖6所示,若平面是平面再逆時針旋轉角度後的平面,要找到在平面上的應力分量,可以在莫爾圓上從已知應力點 同樣以逆時針旋轉,但旋轉角度 ,旋轉到點,也就是讓線和線之間的夾角是。

倍角法的作法源自於通過點的二實際平面之間的夾角(圖4),是其對應應力點 在莫爾圓上和圓心連線形成夾角的一半。
倍角關係是因為莫爾圓的參數式是的函數。也可以從在材料點 上的平面和夾角是90度,而在莫爾圓上其應力點夾角為180度看出(90度的兩倍)。
極點法(或平面原點法)
.svg.png.webp)
第二種方式和要找到莫爾圓上的一個點,稱為極點(pole)或是平面原點(origin of planes)。從極點畫的任何直線都會和莫爾圓相交,交點表示在和直線相同角度的平面上的應力狀態。因此若知道任何特定平面上的應力分量及,可以畫一條線通過莫爾圓上的 和,且和平面平行,找到莫爾圓上這些線的交點,即為極點。例如,假設有應力狀態如圓7所示,其分量是, 及。首先先從點畫一條線,平行的作用平面,或是從點畫一條線,平行的作用平面,任一條線都會和莫爾圓交會,交會的點即為極點。在找到極點後,若要找到和垂直有夾角的平面上的應力,可以從極點畫一條平行該平面的線(見圖7)。可以根據直線和莫爾圓的交點找到平面上的正向應力以及剪應力。





找主要平面的方向
最大主要應力及最小主要應力所在的平面方向也稱為主要平面(principal planes),可以用莫爾圓中 的∠BOC及∠BOE判斷,然後將二個角度都取一半。因此和之間的夾角是角∠BOC,是(主要平面和平面夾角)角度的二倍。


而和也可以用以下的方程取得



此方程的解會是二個角度,彼此相差。可以直接用圓的幾何求解此方程,或是用圓的參數式,並且讓等於零(主要平面上的剪應力為0)。

一般三維應力下的莫爾圓
若要繪製三維應力下的莫爾圖,需要先量測其主應力的大小以及方向。


考慮以主應力軸為坐標系統,而不是用, , 坐標系統,並且假設,則在一法向量為 的平面,其應力向量的應力分量及剪力分量會滿足下式








由於,可以用高斯消去法求解, , :





因為及都不是負值,因此其分子滿足

- 因為其分母而且
- 因為其分母而且
- 因為其分母而且









方程式可以寫成
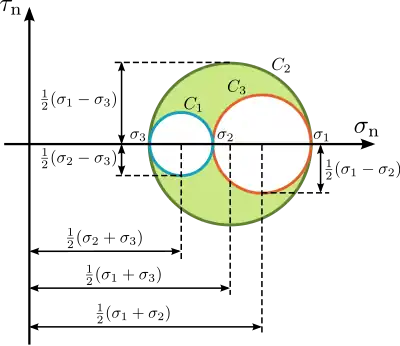
![{\displaystyle {\begin{aligned}\tau _{\mathrm {n} }^{2}+\left[\sigma _{\mathrm {n} }-{\tfrac {1}{2}}(\sigma _{2}+\sigma _{3})\right]^{2}\geq \left({\tfrac {1}{2}}(\sigma _{2}-\sigma _{3})\right)^{2}\\\tau _{\mathrm {n} }^{2}+\left[\sigma _{\mathrm {n} }-{\tfrac {1}{2}}(\sigma _{1}+\sigma _{3})\right]^{2}\leq \left({\tfrac {1}{2}}(\sigma _{1}-\sigma _{3})\right)^{2}\\\tau _{\mathrm {n} }^{2}+\left[\sigma _{\mathrm {n} }-{\tfrac {1}{2}}(\sigma _{1}+\sigma _{2})\right]^{2}\geq \left({\tfrac {1}{2}}(\sigma _{1}-\sigma _{2})\right)^{2}\\\end{aligned}}}](../I/d28046575eb3837044e07c9c8b3c6d70e641087b.svg)
是三個應力莫爾圓, 和的方程,其半徑分別是, 及,而其圓心分別在, , 。






![{\displaystyle \left[{\tfrac {1}{2}}(\sigma _{2}+\sigma _{3}),0\right]}](../I/d32d3b2fb09d202625baa0df42fc08db094ce4c5.svg)
![{\displaystyle \left[{\tfrac {1}{2}}(\sigma _{1}+\sigma _{3}),0\right]}](../I/be6108f95fb1e9bf64d2e770f8e220e91505d59b.svg)
![{\displaystyle \left[{\tfrac {1}{2}}(\sigma _{1}+\sigma _{2}),0\right]}](../I/04758ef4c7e5169326291b5857f30c6ae9f83dee.svg)
有了上述三個應力莫爾圓的方程,所有可能的應力點都會在三個應力莫爾圓之間的陰影區域(見圖10)。應力點 可能滿足圓的方程,或是在圓的外面,可能滿足圓的方程,或是在圓的裡面,可能滿足圓的方程,或是在圓的外面。
相關條目
- 臨界面分析
腳註
- Parry, Richard Hawley Grey. 2. Taylor & Francis. 2004: 1–30 [2018-02-05]. ISBN 0-415-27297-1. (原始内容存档于2020-08-07).
- Russell C. Hibbeler. . 2010: 461–462. ISBN 978-0136022305 (英语).
參考資料
- Beer, Ferdinand Pierre; Elwood Russell Johnston; John T. DeWolf. . McGraw-Hill Professional. 1992. ISBN 0-07-112939-1.
- Brady, B.H.G.; E.T. Brown. Third. Kluwer Academic Publisher. 1993: 17–29 [2018-02-05]. ISBN 0-412-47550-2. (原始内容存档于2020-08-07).
- Davis, R. O.; Selvadurai. A. P. S. . Cambridge University Press. 1996: 16–26 [2018-02-05]. ISBN 0-521-49827-9. (原始内容存档于2020-08-07).
- Holtz, Robert D.; Kovacs, William D. . Prentice-Hall civil engineering and engineering mechanics series. Prentice-Hall. 1981 [2018-02-05]. ISBN 0-13-484394-0. (原始内容存档于2019-06-08).
- Jaeger, John Conrad; Cook, N.G.W; Zimmerman, R.W. Fourth. Wiley-Blackwell. 2007: 9–41 [2018-02-05]. ISBN 0-632-05759-9. (原始内容存档于2019-06-02).
- Jumikis, Alfreds R. . Van Nostrand Reinhold Co. 1969 [2018-02-05]. ISBN 0-442-04199-3. (原始内容存档于2019-06-08).
- Parry, Richard Hawley Grey. 2. Taylor & Francis. 2004: 1–30 [2018-02-05]. ISBN 0-415-27297-1. (原始内容存档于2020-08-07).
- Timoshenko, Stephen P.; James Norman Goodier. Third. McGraw-Hill International Editions. 1970. ISBN 0-07-085805-5.
- Timoshenko, Stephen P. . Dover Books on Physics. Dover Publications. 1983. ISBN 0-486-61187-6.