機械手臂
機械手臂(英語:)是具有模仿人類手臂功能並可完成各種作業的自動控制設備,這種机器人系统有多關節連結並節允許在平面或三度空間進行運動或使用線性位移移動。構造上由機械主體、控制器、伺服機構和感應器所組成,並由程式根據作業需求設定其一定的指定動作。機器人的運作由電動機驅動移動一隻手臂,張開或關閉一個夾子的動作,並精確的回饋至可編程邏輯的控制器。[1][2]這種自動裝置機械以完成「腕部以及手部」的動作為主要訴求,可以由熟練的操作者將作業順序輸入後,就能依樣照作並且反覆完成無數次的的正確規律運作。[3]
自從機器手臂技術開始發展,在1980年代機器手臂已成功的應用於汽車製造業等產業,在机械人技术领域是應用範圍最廣泛的自动化机械装置,而許多工業危險之組裝、噴漆、焊接、高溫鑄鍛等繁重工作,皆能以機器手臂取代人工作業。[4]目前機械手臂在機械人技術領域中得到最廣泛實際應用的自動化機械裝置,除了主要用於工業製造上,商業農業、醫療救援、娛樂服務、軍事保全甚至在太空探索等領域都可以發現其應用裝置。[3]
演進與發展歷程

機械人一詞,最早出現在1921年捷克科幻作家卡雷爾·恰佩克的《羅素姆的萬能機器人》(Rossum's Universal Robots)一书中,原文是“Robota”[5]。然而,如果要真正的清楚區分的話,非完全人形機器的產業自動化機械還是應該以「機械手臂」(robotical arm)或「機械手」(manipulator)來稱呼。在20世紀之前,人們還是以模擬人類的動作將機器人應用在生活或娛樂上面。第一台專門應用於產業生產使用的機械手臂則是由具有「機械手臂之父」之稱的约瑟夫·恩格伯格所發明的。他創立了Unimation有限公司,在1956年利用喬治·迪沃爾所授權的專利技術,研發出第一台工業用機械手臂,名為“Unimate”。而這台機械手臂第一次應用則是在美國通用汽車的新紐澤西州廠的壓鑄作業上。其實在這個時期世界各國的機械手臂也正在萌芽發展階段,例如日本不二輸送機工業株式會社(Fuji Yusoki Kogyo Co. Ltd.)就在1963年製造出專門使用在棧板裝載(Palletizing)的機械手臂,研發出針對棧板專用的搬運工具,此時已經從簡單重複的加工動作更擴大到減輕人力負擔的搬運機械上。[6]
這個時期所研發出來的機械手臂多為3個關節軸,而且直到目前為止依然被產業界廣泛應用,尤其對於簡單的加工、夾持與搬運,成為自動化生產製造必備的好夥伴。然而隨著加工方式的多元與複雜化,機械手臂也開始朝著更多關節軸的技術發展,在1973年德國庫卡機器人集團(KUKA Robot Group)就研發出第一台採用機電驅動的6軸機械手臂。從此開始隨著驅動與控制技術的不斷進步,產業用機械手臂也從單點加工,發展到多點同時加工、搬運,這對於生產線的自動化,乃至於整廠自動化的影響都非常大。[6]
種類與原理
目前產業所使用的機器人大多以機械手臂的型式為主,機械手臂又以各種形狀與大小而有所不同,常見的型式有線性手臂、SCARA手臂、關節多軸機械手臂等[7]。從關節構造上,可分為三軸(含)以下(簡稱三軸)與四軸(含)以上(簡稱多軸)兩大類。之所以要進行分類,是因為這兩方面使用的市場、廠商並不衝突。雖然在應用上的原理類似但是兩者的技術並不相同,也因為使用者的需求不同自然在功能區隔上就會非常明顯[8]。機械手部會根據工作種類附加各式的夾持或加工工具,設計上是模仿人類手部機能為主[3]。
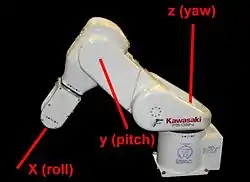
從機械手臂行走運動原理,可分為直角座標型、圓柱座標型、極座標型、關節型座標種類。所謂直角座標就是移動方式與前一臂件分成90度角,計算用X、Y、Z等作為代表座標,在各座標的長度範圍內進行工作或運動。 圓柱座標手臂包含有三個關節,主要的結構是環繞基底主體作軸承旋轉執行動作,其上方有兩個可直線滑動的手臂沿著水平方向運動和仰俯角垂直方向運動控制,另外一各所能涵蓋的體積為一圓柱型旋轉,所以手臂的端點能掃過兩個圓柱間所有點。 極座標有一手臂由另兩個旋轉軸所支撐,一個是圍繞著基座轉動,能做線性運動的收入伸出,另一個是由基座繞垂直做出垂直線性的轉動。 關節型旋轉座標上有三個以上的轉動軸,其中一個連桿是裝在基座上能繞基座旋轉,另兩個連桿的運動型態就如同鉸鍊間兩工件能做相對的轉動,其轉動軸在水平和垂直都有。[9][10]
應用與發展

機械手臂在產業自動化的應用已經相當廣泛,因為各個國家產業分佈的不同,以及各產業對於機械手臂的需求量也有差異。主要是使用於人工無法進行或者會耗費較多時間來做的工作,機械手臂在精度與耐用性上可以減少許人為的不可預知問題。自從第一台產業用機器人發明以來,機械手臂的應用也從原本的汽車工業、模具製造、電子製程等相關產業,更拓展到農業、醫療、服務業等等。[8]
多軸機械手臂研發方面,多軸式機械手臂廣泛應用於汽車製造商、汽車零組件與電子相關產業。機械手臂可以提昇產品技術與品質,而這些初期工作大多可以藉由機械手臂來完成。機械手臂的精準、零誤差,對於產品的品質掌握自然擁有其優勢,減少品管所花費的時間與人力。工業應用上,以裝配、加工、熔接、切削、加壓、貨物搬運、檢測等,全球目前產業使用量是以汽車、汽車零組件、化工、橡膠和塑料等最大。[8]
現在,ROBOT的應用已越來越多元化,依據國際機器人協會(IFR)的統計,至2007年底機械手臂除了工業以外,最多應用於救援、保全與野地(田野、牧場等),近年來,各先進國家為了提昇台機器人的技術水準,都會推廣機器人產業與創立相關聯盟,並且特別針對工業以外的領域進行推廣,例如:醫療、服務、生活方面…等。以醫療為例,有許多大型醫學中心使用以手動操控方式之機械手臂,結合顯微影像顯示系統所結合的手術型機器人。機械手臂的研發也朝向節省人力、減少人類暴露在危險的工作環境、甚至進行更加精密的工作或是輔助操作。機械手臂的技術發展都是為了讓人類在工作與生活中更加便利。[8]
参考文献
- . OSHA. 1999-01-20. (原始内容存档于2021-03-24) (英语).
- Craig R. Carignan. (PDF). University of Maryland: pg 9. 2002-05-26. (原始内容 (PDF)存档于2017-11-16) (英语).
- 和田忠太. . 劉明成 譯. 世茂出版. 1999年8月25日: 186–187. ISBN 9575298543 (中文(臺灣)).
- 陳永耀. . 2009-06-15 [2011-07-11] (中文(臺灣)).
- . 環球科學. 2007年2月1日. (原始内容存档于2016年11月17日) (中文(臺灣)).
- 盧世元. . MM機械技術雜誌. 2009-05-01, 291期: 36–39 [2011-07-11]. ISSN 1029-6298. (原始内容存档于2013-04-27) (中文(臺灣)).
- 產業機器人發展之未來趨勢
- 盧世元. . MM機械技術雜誌. 2009-05-01, 291期: 40–45 [2011-07-11]. ISSN 1029-6298. (原始内容存档于2013-04-27) (中文(臺灣)).
- (PDF). 修平技術學院. [2011-07-11] (中文(臺灣)).
- 李芳繁、王智立. 農業機械學刊. 1999年9月, 第8卷 (第3期): 2. ISSN 1019-0430 (中文(臺灣)). 缺少或
|title=为空 (帮助)