CORDIC
CORDIC(全稱為coordinate rotation digital computer),也稱為Volder演算法,是一個可以計算三角函數,簡單且有效率的演算法,可以在任意進制下運算,一般會每次計算一位數字。因此CORDIC屬於逐位計算(Digit-by-digit)方法中的一個例子。
| 三角学 |
|---|
 |
| 参考 |
| 定理 |
| 微积分 |
CORDIC演算法還有其他的名稱,像是圓形CORDIC (Jack E. Volder)[1][2]、線性CORDIC、雙曲線CORDIC(John Stephen Walther)[3][4]、及泛用雙曲線CORDIC(GH CORDIC, Yuanyong Luo et al.)[5][6]。用類似的方式也可以計算雙曲函數、平方根、乘法、除法、指數及對數等。
CORDIC和一些名為「偽乘法」(pseudo-multiplication)、「偽除法」(pseudo-division)及factor combining的方法,常用在沒有乘法器的應用(像是簡單的微控制器以及FPGA),其中會用到的運算是加法、減法、位元移位及查找表。這些算法可歸類在「移位和相加」(shift-and-add)演算法中。在計算機科學中,若CPU沒有硬體的乘法器,常會用CORDIC來實現浮点数运算。
歷史
英國數學家亨利·布里格斯早在1624年時就已發現此算法[7][8],後來Robert Flower也在1771年時發現[9],不過後來是因為低複雜度的有限狀態CPU,才針對CORDIC作較進一步的最佳化。
CORDIC是在1956年問世[10][11],是由康维尔空氣電子部門的Jack E. Volder發現,一開始是因為要取代B-58轟炸機導航電腦上面的類比式解角器(resolver),更換成更準確而實時的數位方案[11]。因此,有時也會將CORDIC稱為數位解角器(digital resolver)[12][13]。
Volder的研究,是因為1946年版CRC化学和物理手册中的公式而得到靈感[11]:

其中是使成立的值,且。



他的研究最後產生了一個內部的技術報告,提到用CORDIC演算法來求解正弦及餘弦函數,以及一個實現此功能的原型電腦[10][11]。報告中也提到用修改版的CORDIC演算法計算雙曲函數、座標旋轉、對數及指數的可能性[10][11]。用CORDIC來進行乘法和除法運算的想法也是在此時形成[11]。依照CORDIC演算法的原則,Volder的同事Dan H. Daggett發展了在二進位以及二進碼十進數(BCD)之間轉換的演算法[11][14]。
應用
CORDIC用簡單的移位和相加運算來處理像是三角函數、雙曲函數、對數函數、實數及複數乘法、除法、方根計算、線性系統求解、特徵值估測、奇异值分解、QR分解等。因此,CORDIC可以用在許多的應用中,像是信號處理、影像處理、通訊系統、机器人学及三维计算机图形等[15][16]。
硬體
若沒有硬體乘法器的話,CORDIC一般會比其他算法要快很多,若是用FPGA或ASIC的話,使用的邏輯閘也會少很多。
CORDIC是FPGA開發應用程式(像是Xilinx的Vivado)中的標準半导体IP核,而不是使用特殊函數的冪級數實現,其原因是CORDIC IP的通用性,CORDIC可以計算許多不同的函數,而為特定函數開發的乘法器只能計算特定的函數。
另一方面,若有硬體乘法器(例如DSP),查表法及冪級數會比CORDIC快很多。近年來,CORDIC演算法常用在生醫應用中,尤其是用FPGA實現的應用。
使用泰勒级数的問題是此方法可以產生小的絕對誤差,但其中沒有良態的相對誤差[17]。其他多項式近似法,例如Minimax近似演算法,可以同時控制這二種的誤差。
軟體
在CPU只有整數運算的古老系統中,會將CORDIC放在其IEEE 754函式庫的一部份。現代的通用CPU已有浮點運算暫存器,也有加法、減法、乘法、除法、三角函數、平方根、一般對數、自然對數等,幾乎沒有用到CORDIC的場合。只有一些有特殊安全性或是時間要求的應用程式才會用到CORDIC。
運作模式
旋轉模式
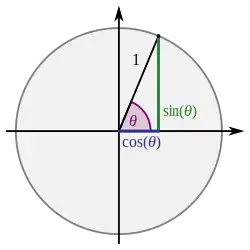
CORDIC可以用來計算許多不同的函數。以下說明如何在旋轉模式(rotation mode)下的CORDIC計算角度的正弦函數和餘弦函數,假設角度以弧度的定點格式表示。要找到一個角度的正弦函數和餘弦函數,可以在單位圓上找到對應角度的y座標和座標。利用CORDIC,會從以下的向量開始:



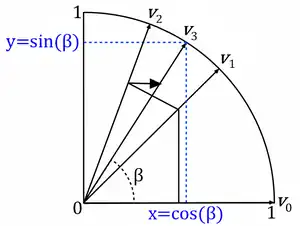
在第一次的迭代時,向量逆時針轉45°,得到向量。接著繼續的迭代,每一次的角度漸漸變小,旋轉方向可能順時針,也可能逆時針,直到得到想要的角度為止。每一次的角度為,其中。



若以更正式的方式表示,每一次的迭代就是一次旋轉,也就是將向量乘以旋转矩阵:



旋转矩阵為

利用以下兩個三角恆等式:

旋转矩阵變成

旋转向量就會變成下式


其中和是的分量,若將角度限制在使的值,和tangent的乘法就以變成乘(或除)2的幂次,在數位電腦硬體中可以快速的用位元右移或左移來計算。因此上法會變成





其中

且是用來判斷旋轉方向的。若角度為正,則為+1,否則則為−1。

所有的因子可以在迭代過程中忽略,最後再一次乘以因子即可:



此數可以事先計算好存在表格中,若迭代次數是固定的,只需計算一個常數且儲存即可,甚至此修正也可以事先進行,將常數先乘以,可以節省一次乘法。另外,可以注意到[18]

因此可以簡化演算法的複雜度。有些應用會避免修正,因此此演算法本身會帶一個增益[19]:



在夠多次的迭代後,向量的角度會接近想要的角度。以一般的應用來說,40次的迭代(n = 40)已可以有小數10位的精度。
唯一未解決的問題是判斷每一次迭代要順時針旋轉或逆時針旋轉(選擇的值)。這可以記錄每一次旋轉的角度,從還需要旋轉的角度中減去此一角度,會得到下一個還需要旋轉的角度。若為正,需要順時針旋轉,否則,就需要順時針旋轉:




的值需要事先計算且記錄下來。不過若是小角度,根據小角度近似,在定點數下可得,因此可以節省儲存用的空間。


如以上所述,角度的正弦函數為其y坐標,餘弦函數為其x坐標。
向量模式
上述旋轉模式的演算法,是旋轉原來位在x軸上的單位向量。但此演算法可以用來旋轉角度在−及之間的任意向量,旋轉的方向則依的正負號決定。


向量模式下的演算法和旋轉模式略有不同。其啟始向量的x坐標要為正值,y坐標則為任意值。持續轉動的目的是將向量旋轉到x軸(因此y座標為0)。每一步裡的旋轉方向會由y的值決定。的最終值包括了總旋轉角度。x的最終值是原向量的大小,再乘以K。因此,可以看出向量模式可以進行直角坐標到極坐標的轉換。
實現
Java的Math類別中有scalb(double x,int scale)方法可以實現二進位的移位[20],C語言有ldexp函數[21],x86處理器有fscale浮點運算[22]。
軟體範例(Python)
from math import atan2, sqrt, sin, cos, radians
ITERS = 16
theta_table = [atan2(1, 2**i) for i in range(ITERS)]
def compute_K(n):
"""
Compute K(n) for n = ITERS. This could also be
stored as an explicit constant if ITERS above is fixed.
"""
k = 1.0
for i in range(n):
k *= 1 / sqrt(1 + 2 ** (-2 * i))
return k
def CORDIC(alpha, n):
K_n = compute_K(n)
theta = 0.0
x = 1.0
y = 0.0
P2i = 1 # This will be 2**(-i) in the loop below
for arc_tangent in theta_table:
sigma = +1 if theta < alpha else -1
theta += sigma * arc_tangent
x, y = x - sigma * y * P2i, sigma * P2i * x + y
P2i /= 2
return x * K_n, y * K_n
if __name__ == "__main__":
# Print a table of computed sines and cosines, from -90° to +90°, in steps of 15°,
# comparing against the available math routines.
print(" x sin(x) diff. sine cos(x) diff. cosine ")
for x in range(-90, 91, 15):
cos_x, sin_x = CORDIC(radians(x), ITERS)
print(
f"{x:+05.1f}° {sin_x:+.8f} ({sin_x-sin(radians(x)):+.8f}) {cos_x:+.8f} ({cos_x-cos(radians(x)):+.8f})"
)
輸出
$ python cordic.py
x sin(x) diff. sine cos(x) diff. cosine
-90.0° -1.00000000 (+0.00000000) -0.00001759 (-0.00001759)
-75.0° -0.96592181 (+0.00000402) +0.25883404 (+0.00001499)
-60.0° -0.86601812 (+0.00000729) +0.50001262 (+0.00001262)
-45.0° -0.70711776 (-0.00001098) +0.70709580 (-0.00001098)
-30.0° -0.50001262 (-0.00001262) +0.86601812 (-0.00000729)
-15.0° -0.25883404 (-0.00001499) +0.96592181 (-0.00000402)
+00.0° +0.00001759 (+0.00001759) +1.00000000 (-0.00000000)
+15.0° +0.25883404 (+0.00001499) +0.96592181 (-0.00000402)
+30.0° +0.50001262 (+0.00001262) +0.86601812 (-0.00000729)
+45.0° +0.70709580 (-0.00001098) +0.70711776 (+0.00001098)
+60.0° +0.86601812 (-0.00000729) +0.50001262 (+0.00001262)
+75.0° +0.96592181 (-0.00000402) +0.25883404 (+0.00001499)
+90.0° +1.00000000 (-0.00000000) -0.00001759 (-0.00001759)
雙重迭代CORDIC
在Vladimir Baykov的二篇文獻中[23][24],曾經提到用「雙重迭代」(double iterations)來實現反正弦函數、反餘弦函數、自然對數、指數函數以及雙曲函數。雙重迭代中的作法和傳統的CORDIC演算法不同,傳統的CORDIC演算法中,迭代變數會在每次迭代時加一。但在雙重迭代中,迭代變數會先重複一次,然後才加一。因此雙重迭代CORDIC演算法的迭代變數會是,而傳統CORDIC演算法的迭代變數是。雙重迭代法保證方法的收斂,不過其引數的有效範圍會變化。


針對進制數字系統中,通用的CORDIC收斂問題,可以證明[25]針對正弦、餘弦及反正切函數,每一個i(i = 0或1到n,其中n是位數)進行次迭代就可以保證收斂。若是自然對數、指數、雙曲正弦、雙曲餘弦及雙曲反正切函數,每一個i需要進行次迭代。若是反正弦函數及反餘弦函數,每一個i需要進行2 次的迭代[25]。


若是雙曲反正弦及雙曲反餘弦函數,每一個i需要進行2R次的迭代。
相關演算法
CORDIC屬於「移位及加法」(shift-and-add)的演算法,就像Henry Briggs文獻提到的對數和指數演算法一樣。BKM演算法也是可以計算許多基本函數的移位及加法演算法,是複數平面下對數和指數演算法的推廣。BKM可以計算實數角度(以弧度表示)的正弦和餘弦,其方式是計算的指數,也就是。BKM演算法比CORDIC要複雜一些,但其優點是不需考慮比例因子(K)。



參考資料
- Volder, Jack E. (PDF). Proceedings of the Western Joint Computer Conference (WJCC) (presentation) (San Francisco, California, USA: National Joint Computer Committee (NJCC)). 1959-03-03: 257–261 [2016-01-02].
- Volder, Jack E. (PDF). IRE Transactions on Electronic Computers (The Institute of Radio Engineers, Inc. (IRE)). 1959-05-25, 8 (3): 330–334 (reprint: 226–230) (September 1959) [2016-01-01]. EC-8(3):330–334. (原始内容 (PDF)存档于2021-06-12).
- Walther, John Stephen. 写于Palo Alto, California, USA. (PDF). Proceedings of the Spring Joint Computer Conference (Atlantic City, New Jersey, USA: Hewlett-Packard Company). May 1971, 38: 379–385 [2016-01-01]. (原始内容 (PDF)存档于2021-06-12) –American Federation of Information Processing Societies (AFIPS).
- Walther, John Stephen. . The Journal of VLSI Signal Processing (Hingham, MA, USA: Kluwer Academic Publishers). June 2000, 25 (2 (Special issue on CORDIC)): 107–112. ISSN 0922-5773. S2CID 26922158. doi:10.1023/A:1008162721424.
- Luo, Yuanyong; Wang, Yuxuan; Ha, Yajun; Wang, Zhongfeng; Chen, Siyuan; Pan, Hongbing. . IEEE Transactions on Very Large Scale Integration (VLSI) Systems. September 2019, 27 (9): 2156–2169. S2CID 196171166. doi:10.1109/TVLSI.2019.2919557.
- Luo, Yuanyong; Wang, Yuxuan; Ha, Yajun; Wang, Zhongfeng; Chen, Siyuan; Pan, Hongbing. . IEEE Transactions on Very Large Scale Integration (VLSI) Systems. September 2019, 27 (9): 2222. S2CID 201711001. doi:10.1109/TVLSI.2019.2932174.
- Briggs, Henry. . London. 1624. (Translation: 的存檔,存档日期4 March 2016.)
- Laporte, Jacques. . Paris, France. 2014 [2016-01-02]. (原始内容存档于2015-03-09). 的存檔,存档日期2020-08-10.
- Flower, Robert. . London: J. Beecroft. 1771 [2016-01-02].
- Volder, Jack E., (internal report), Convair, Aeroelectronics group, 1956-06-15, IAR-1.148
- Volder, Jack E. (PDF). Journal of VLSI Signal Processing (Hingham, MA, USA: Kluwer Academic Publishers). June 2000, 25 (2 (Special issue on CORDIC)): 101–105 [2016-01-02]. ISSN 0922-5773. S2CID 112881. doi:10.1023/A:1008110704586. (原始内容 (PDF)存档于2016-03-04).
- Perle, Michael D., , Computer Design (Boston, MA, USA: Computer Design Publishing Corp.), June 1971: 72–78 (NB. Some sources erroneously refer to this as by P. Z. Perle or in Component Design.)
- Schmid, Hermann. 1 (reprint). Malabar, Florida, USA: Robert E. Krieger Publishing Company. 1983: 162, 165–176, 181–193 [2016-01-03]. ISBN 0-89874-318-4. (NB. At least some batches of this reprint edition were misprints with defective pages 115–146.)
- Daggett, Dan H. . IRE Transactions on Electronic Computers (The Institute of Radio Engineers, Inc. (IRE)). September 1959, 8 (3): 335–339 [2016-01-02]. ISSN 0367-9950. doi:10.1109/TEC.1959.5222694. EC-8(3):335–339.
- Meher, Pramod Kumar; Valls, Javier; Juang, Tso-Bing; Sridharan, K.; Maharatna, Koushik. (PDF). IEEE Transactions on Circuits and Systems I: Regular Papers. 2008-08-22, 56 (9): 1893–1907 (2009-09-09). S2CID 5465045. doi:10.1109/TCSI.2009.2025803.
- Meher, Pramod Kumar; Park, Sang Yoon. . IEEE Transactions on Very Large Scale Integration (VLSI) Systems. February 2013, 21 (2): 217–228. S2CID 7059383. doi:10.1109/TVLSI.2012.2187080.
- . Math Stack Exchange. [2021-01-01].
- Muller, Jean-Michel. 2. Boston: Birkhäuser. 2006: 134 [2015-12-01]. ISBN 978-0-8176-4372-0. LCCN 2005048094.
- Andraka, Ray. (PDF). ACM (North Kingstown, RI, USA: Andraka Consulting Group, Inc.). 1998 [2016-05-08]. 0-89791-978-5/98/01.
- . Java Platform Standard 8. Oracle Corporation. 2018 [2018-08-06]. (原始内容存档于2018-08-06).
- . cppreference.com. 2015-06-11 [2018-08-06]. (原始内容存档于2018-08-06).
- . (PDF). Intel Corporation. September 2016: 8–22.
- Baykov, Vladimir. . baykov.de. [2023-05-03].
- Baykov, Vladimir. . baykov.de. [2023-05-03].
- Baykov, Vladimir. . baykov.de. [2023-05-03].