根軌跡圖
根軌跡圖(root locus)是控制理論及穩定性理論中,繪圖分析的方式,可以看到在特定參數(一般會是回授系統的环路增益)變化時,系統極點的變化。根軌跡圖是由Walter R. Evans所發展的技巧,是經典控制理論中的稳定性判据,可以判斷線性非時變系統是否穩定。
用途

除了確認系統的穩定性外,根軌跡圖也可以用來設計回授系統的阻尼比(ζ)及自然頻率(ωn)。定阻尼比的線是從原點往外延伸的線,而固定自然頻率的線是圓心在原點的圓弧。在根軌跡圖上選擇有想要的阻尼比及自然頻率的點,可以計算增益K並且實現其控制器。在許多教材科書上有利用根軌跡圖設計控制器的精細技巧,例如超前-滞后补偿器、PI、PD及PID控制器都可以用此技巧來近似設計。
以上使用阻尼比及自然頻率的定義,前提是假設整個回授系統可以用二階系統來近似,也就是說系統有一對主要的複數極點,不過多半的情形都不是如此,因此在實做時仍需要針對系統再進行模擬,確認符合需求。
定義
回授系統的根軌跡圖是用繪圖的方式在複數s-平面上畫出在系統參數變化時,回授系統閉迴路極點的可能位置。這些點是根軌跡圖中滿足角度條件(angle condition)的點。根軌跡圖中特定點的參數數值可以用量值條件(magnitude condition)來計算。
假設有個回授系統,輸入信號、輸出信號。其順向路徑传递函数為,回授路徑传递函数為。




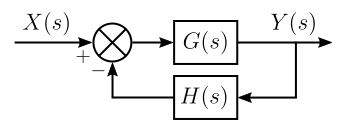

因此,閉迴路傳遞函數的極點為特徵方程式的根,方程式的根可以令來求得。


若是一個沒有純粹延遲的系統,的乘積為有理的多項式函數,可以表示為[2]


其中為個零點,為個極點,而為增益。一般而言,root locus diagram會標示在不同參數時,傳遞函數極點的位置。而root locus plot就會畫出針對任意值下,使的極點 ,但無法看出值變化時,極點移動的趨勢。





因為只有的係數以及簡單的單項,此有理多項式的值可以用向量的技巧來計算,也就是將量值相乘或是相除,角度相加或是相減。向量公式的由來是因為有理多項式的每一個因式就表示一個s-平面下由到的向量,因此可以透過計算每一個向量的量值及角度來計算多項式。



根據矩陣數學,有理多項式的相角等於所有分子項的角度和,減去所有分母項的角度和。因此若要測試s-平面上的一點是否在根軌跡圖上,只要看開迴路的零點及極點即可,這稱為角度條件。
有理多項式的量值也是所有分子項的量值乘積,再除以所有分母項量值的乘積。若只是要確認一個s-平面上的點是否在根軌跡圖上,不需要計算有理多項式的量值,因為值會變,而且可以是任意的整數。針對根軌跡圖上的每一點,都可以計算其對應的值,此即為量值條件。
以前繪製根軌跡圖會使用名叫Spirule的特殊量角器,可以用來確認角度並且繪製根軌跡圖[3]
根軌跡圖只能提供在增益變化時閉迴路極點的位置資訊。的數值不影響零點的位置,閉迴路零點和開迴路的零點相同。







繪製根軌跡圖
-(1_3_5_1).png.webp)
利用一些基本的技巧,可以用根軌跡法繪製K值變化時極點的軌跡。根軌跡圖可以看出回授系統在不同 下的穩定性以及動態特性[4][5]。其規則如下:
令P為極點的個數,Z為零點的個數,兩者相減即為渐近线的數量:

漸近線和實軸的交點在(稱為形心),往外延伸的角度為:




其中為所有極點數值的和,為所有明確零點數值的和


- 根據測試點的相位條件判斷其往外延伸的角度
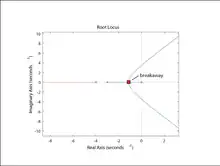
- 計算分離點(breakaway/break-in points)
根軌跡圖上的分離點(二條根軌跡圖上的軌跡相交的點)是滿足下式的根

只要解開z,實根即為分離點,若是虛數,表示沒有分離點。
相關條目
參考資料
- Kuo 1967,第331頁.
- Kuo 1967,第332頁.
- Evans, Walter R., , Whittier, CA: The Spirule Company, 1965
- Evans, W. R., , Trans. AIEE, January 1948, 67 (1): 547–551, ISSN 0096-3860, doi:10.1109/T-AIEE.1948.5059708
- Evans, W. R., , Trans. AIEE, January 1950, 69 (1): 66–69, ISSN 0096-3860, doi:10.1109/T-AIEE.1950.5060121
- Kuo, Benjamin C., , second, Englewood Cliffs, NJ: Prentice-Hall: 329–388, 1967, ASIN B000KPT04C, LCCN 67016388, OCLC 3805225
延伸閱讀
- Ash, R. H.; Ash, G. H., , IEEE Trans. Automatic Control, October 1968, 13 (5), doi:10.1109/TAC.1968.1098980
- Williamson, S. E., , Control Magazine, May 1968, 12 (119): 404–407
- Williamson, S. E., , Control Magazine, June 1968, 12 (120): 556–559
- Williamson, S. E., , Control Magazine, July 1968, 12 (121): 645–647
- Williamson, S. E., , IEE Electronics Letters, May 15, 1969, 5 (10): 209–210, doi:10.1049/el:19690159
- Williamson, S. E., (PDF), Proc. IEE, July 1969, 116 (7): 1269–1271, doi:10.1049/piee.1969.0235
外部連結
- Wikibooks: Control Systems/Root Locus
- Carnegie Mellon / University of Michigan Tutorial
- Excellent examples. Start with example 5 and proceed backwards through 4 to 1. Also visit the main page
- The root-locus method: Drawing by hand techniques
- "RootLocs": A free multi-featured root-locus plotter for Mac and Windows platforms
- "Root Locus": A free root-locus plotter/analyzer for Windows
- Root Locus at ControlTheoryPro.com
- Root Locus Analysis of Control Systems
- MATLAB function for computing root locus of a SISO open-loop model
- Wechsler, E. R., (PDF), NASA: 60–64, January–March 1983 [2017-06-02], TDA Progress Report 42-73, (原始内容 (PDF)存档于2016-12-24)
- Mathematica function for plotting the root locus (页面存档备份,存于)