自行車及摩托車的動力學
自行車及摩托車的動力學是有關自行車及機車以及其零組件,因受力而產生運動的物理學,屬於多體動力學的範疇。動力學屬於物理學中经典力学的領域。自行車的運動中,比較多人在意的包括力学平衡、反向操舵(countersteering)、煞車、加速度、懸吊系統靈活性、以及振动。對於自行車運動的研究從十九世紀末就開始了,目前仍有相關的研究[1][2][3]
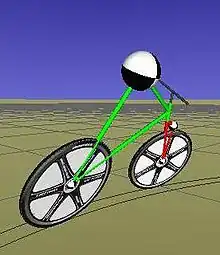

自行車及機車都是二個輪子共平面,可以只產生一個輪跡的單軌車輛,因此其運動有許多的基本共同點,本質上也和其他車輛(例如兩輪同軸的雙輪車、自行三轮车、四輪車)不同,並且更加困難[4]。自行車和單輪車類似,在靜止時沒有側向的穩定性,大部份情形下,自行車在前進時,車身需維持直立。实验及数学模型可以證明,當脚踏車的質心被操控維持在車輪上時,車身可以維持直立。多半就是騎車的人來操控,有時自行車也可以在無人控制的情形下維持平衡。包括幾何、質量分佈及陀螺效應的幾個因素都在不同程度影響其本體穩定度。但長期存在宣稱以陀螺效應與曳距為的單一效應(例如陀螺效應或自行車和摩托車的幾何)決定自行車的穩定,的假設已確定不成立[1][5][6][7]。
學習自行車時,初期目標就是如何使車輛在行進間穩定直立,不過在轉彎時,為了維持平衡,自行車需要傾斜:若速率越快,或是轉彎半径越小,其傾斜程度要越大。傾斜可以平衡離心力及重力的影響。傾斜一般是瞬時往反方向轉向,稱為反向操舵。反向操舵之技巧是透過运动技能学习所習得的,是透過程序記憶運作,不是透過有意識的思考。自行車和其他的車輛不同,其主要控制輸入是給龍頭的力矩,而不是位置[8]。
自行車在靜止時有縱向的穩定性,而自行車的重心較高,軸距較短,因此在有足夠加速度或是減速度的情形下,可以使一個輪子離地。在煞車時,依照自行車及騎者重心位置的不同,以及前輪接觸地面的位置,自行車有可能前輪打滑,也有可能是自行車旋轉,自行車及騎者一起翻到前輪之前。在加速時也會有類似的情形,不過加速時會相對後輪來分析[9]。
歷史

早在自行車發展期間,就已開始自行車動力學研究的歷史。其中有許多著名科學家的貢獻,例如蘭金、Appell及惠普尔等人[2]。一般認為是十九世紀初期的卡尔·德莱斯發明了兩輪的車輛,有不同的名稱,例如laufmaschine、velocipede、draisine及dandy horse,駕駛者可以透過控制前輪來使車輛平衡[2]。蘭金在1869年在《The Engineer》發表一篇文章,其中重複德莱斯的論點,可以透過向車身傾斜方向轉向來使車輛平衡[10]。
法国科学院在1897年將瞭解自行車的動力學列為Prix Fourneyron競賽的目標,Carlo Bourlet、Emmanuel Carvallo及Francis Whipple在十九世紀末用刚体动力学證明,有些safety bicycle在適當的速度下可以自行平衡[2]。Bourlet贏得Prix Fourneyron,Whipple贏得了剑桥大学的史密斯獎[7]。其中一個關鍵是讓前輪轉向軸和垂直線維持一個角度,不清楚這個是由誰發現的[11]。
David E. H. Jones在1970年於《Physics Today》發表一篇文章,提到在維持自行車平衡的過程中,不一定需要陀螺效應[6]。1971年時,科學家已發現了擺振(wobble)、迂迴擺動(weave)及傾倒(capsize)的運動模式,並且命名[12],那時Robin Sharp已經定期的發表有關自行車及摩托車行為的文章[13]。Robin Sharp在倫敦帝國學院時,和David Limebeer及Simos Evangelou一起共事[14]。
在1970年代初期,康乃爾太空實驗室(CAL,之後位在紐約水牛城的Calspan Corporation)接受Schwinn自行車公司及其他公司的贊助,研究並且模擬自行車及摩托車的動力學。其中部份的成果已公開發表,並且30份詳細報告的掃描檔已在網站中發佈[15]。
Cossalter等人從1990年代開始,在Padova大學研究摩托車的動力學。其研究包括實驗以及數值分析,其中包括了迂迴擺動(weave)[16]、 擺振(wobble)[17]、顫振(chatter)[18]、模擬[19]、車輛建模[20]、輪胎建模[21][22]、操控[23][24]以及最小單圈時間操控(minimum lap time maneuvering)[25][26]。
Meijaard等人在2007年在《皇家學會報告A》中發表了正則的線性化运动方程,配合兩種不同的驗證方式[2]。运动方程假設輪子純滾動沒有滑行,而且駕駛者是牢牢的固定在自行車的後車架上。
Kooijman等人在2011年在《科学》期刊發表,證實自行車的自行平衡,不需要陀螺效應,也不需要因為曳距(trail)而產生的所謂主銷後傾穩定效應(caster effect)[1]。他們設計了雙質量輪滑自行車,雖然曳距為負值,前輪接觸地面的點在前輪轉向軸之前,和一般自行車不同,而且其中有反轉的輪子以抵消陀螺效應。這部車的設計和一般自行車不同,但依照其運動方程,可以自行穩定。之後建構了實體的模型以確認其預測。其中需要一些重新評估轉向幾何以及穩定性的資料。自行車動力學在2011年《发现》的前一百大故事中,排名第26[27]。
2013年時,艾迪·莫克斯因為確認自行車的穩定性,獲得根特大学的15萬歐元[28]。

受力
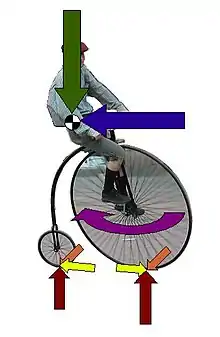
若將自行車和駕駛視為一個系統,作用在系統及其各部份的力可以分為兩類:外力及內力。外力包括重力、慣性力、和地面接觸產生的力、以及和空氣接觸產生的力。內力是駕駛所產生的力,或各部份之間的相互施力。
外力
自行車和駕駛會受到重力的影響,有向下的力,兩個輪子的對地接觸面會受到地面水平方向及垂直方向的反作用力。垂直方向反作用力是因為重力而產生,也會因為加速或是煞車而變化。水平方向反作用力是因為輪子和地面的摩擦,其中也包括了滾動阻力,是因為車輛推進力、煞車力及轉向力而產生。空氣施力中大部份是和前進方向相反的阻力,不過也可能有側風。在自行車以一般速度行駛時,其空氣阻力是反抗其前進的外力中,最大的外力[29]:188。若速度更快,空氣阻力會遠大於其他的阻力。
轉向力是因為操作平衡,以及單純轉彎時產生。可以解讀為在自行車和駕駛此系統的加速参考系中的離心力,或只是靜止惯性参考系下的慣性。陀螺力是因為車輪、引擎、傳動等轉動件所產生,也是因為轉動件的慣量所造成。
運動
自行車的運動可以大致分為不在其對稱面上的(側向運動),以及在其對稱面上的(縱向及垂直運動)。側向運動包括平衡、傾斜、轉向(steering)及轉彎。在對稱面上的運動包括車輪轉動讓自行車前進,也包括翹後輪、翹前輪及懸吊系統的動作,也包括伸縮前叉機車的煞車下沉(brake diving)。不在對稱面上的運動和對稱面上的運動是線性解耦,在一階近似的範圍內互相獨立[2]。未受控的自行車在靜止時,在側向上不穩定,若在適當條件下,或是有駕駛者控制可以側向穩定。縱向穩定的情形不同,自行車在靜止時是縱向穩定的,但在加速或減速太快時可能會縱向不穩定。
側向動力學
自行車的側向動力學比其縱向動力學要複雜的多。側向動力學需三維空間的多體動力分析來能求解,需要二個廣義座標來進行分析。至少要有二個耦合的二階微分方程來找到主要的運動形態[2]。側向動力學不一定能找到解析解,需要用數值分析的方式求解[2]。在文獻和網路上,還可以找到幾種互相競爭,有關自行車如何平衡的理論。另一方面,縱向動力學利用平面運動學即能進行相當程度的分析,而且只需要用到一個軸。
平衡

在討論自行車的平衡時,需要仔細區分「穩定性」(即力学平衡)、「自穩定性」以及「可控制性」。近期的研究認為「駕駛控制的穩定性在本質上和其自穩定性有關」[1]。
若控制自行車的轉向,使地面的反作用力可以平衡自行車受到的其他外力,即可讓自行車保持直立。此處的外力包括傾斜時的重力、轉彎時的慣性力或是離心力、轉向時的迴轉力(gyroscopic)以及側風時的風力[29]。轉向操控一般是由駕駛者控制,自行車在一些特殊的情形下,也可以自行控制平衡[32]。自穩定性是由於許多因素的結合,和自行車的幾何外形、質量分佈、自行車的前進速度有關。輪胎、懸吊系統、轉向的阻尼及車架撓性也都會影響自穩定性,尤其是機車更明顯。
就算是在車輛未行進的情形下,駕駛者也可以用類似原理來使自行車平衡。例如在自行車定竿(自行車不行進,駕駛者腳不著地的情形下維持直立平衡)時,駕駛者可以設法讓駕駛和車輛的結合重心在二個輪胎接地印跡的連線上,以維持平衡,方式是將前輪左右微幅轉向,若需要的話,也可以將車輛微幅的前進及後退,設法調整前輪的接地印跡。讓車輛前進可以靠踏踏板達成,若是死飛,也可以用踏踏板來讓車輛後退。不然,駕駛者也可以利用路面適當的坡度,或是在自行車剎車動作時讓駕駛上半身略為往後傾斜[33]。
若自行車的把手鎖住不能轉彎,在自行車行進時幾乎不可能使車平衡。若是將自行車加上反向旋轉的輪,抵消其陀螺儀效應,自行車在行進時仍可以靠駕駛控制而平衡[5][6]。不論自行車把手是否有鎖住,另一種使自行車平衡的方式是在自行車及駕駛之間施加力矩,作法類似在運動員在高低杠上旋轉的方式。人可以用擺動雙腳的方式,坐在秋千上讓秋千由靜止開始擺動,雙擺也可以用致動器在雙擺轉折處控制而平衡[34]。
前進速度
駕駛者會在自行車龍頭上施加力矩來轉動前輪,以控制自行車傾斜及維持平衡。若速度較快時,小的轉向角度就可以讓前輪接地印跡快速的側向移動。但在低速時,若要在相同時間內將前輪接地印跡移動相同的量,需要較大的轉向角度。因此,自行車在高速時比較容易維持平衡[35]。自平衡一般也是要超過某一個速度後才會出現,自行車若速度越快,自身平衡的效果越好。
重心位置
自行車和駕駛系統的重心越靠近前輪,前輪要維持平衡要做的側向位移越小[36]。若重心越靠近前輪,前輪要維持平衡要做的側向位移越大,或是需要較快的前進速度才能使自行車平衡。這可以從一些長軸距的自行車,例如臥式自行車、哈雷自行車及高把手自行車中即可看出[37]。針對旅行用自行車,在後輪上(甚至後輪後方)有大齒輪的設計,要平衡也是項挑戰[38]。後輪上的重量若比前輪上重量的高度要低,在控制上會比較簡單[11]。
自行車也是固定樞軸點倒單擺的例子。就像掃帚棒比鉛筆更容易在手中平衡一樣,較高的自行車(重心較高)也比較低的自行車要容易平衡,因為較高的自行車其傾斜速率(傾斜角以此速率增加時,車可能會倒)會比較慢[39]。不過車輛在靜止時的平衡情形和在行進時不同。例如重心較高的車在因為紅燈停車時,就會比重心較低的車要難維持平衡。這是垂直型第二類槓桿的例子。支點在輪胎和地面接觸的部份,若重量越靠近支點,需要施的力就越小。因此自行車旅行時會建議將重物放在較低的位置,在自行車前方及後方載物架兩側加掛貨筐[40]。
曳距
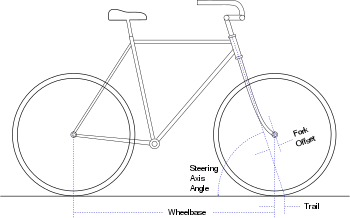
曳距(trail)是前輪轉向軸(就是包括前叉、龍頭、前輪整個轉向機構的樞鈕)延伸到地面的點,領先前輪和地面接觸點的長度,是影響自行車操作性的因素之一。在傳統自行車的設計中(其前輪轉向軸會略為彎曲偏離垂直線的設計),不論前進速度為何,正值的曳距會將前輪轉向車身傾斜的方向[29]。可以用推一部靜止,無人控制自行車,使其自由滑動到另一邊來模擬,前輪多半會轉向車身傾斜的方向。在傾斜時,重力就是使其轉向的力。不過行進中自行車的動力學更加複雜,其他的因素可能會使此效果減弱,也可能增強此效果[1]。
曳距(trail)是頭管角(head angle)、前叉偏移量(rake)以及前輪大小的函數。其關係可以由以下公式來說明[41]:

其中
- 為前輪半徑
- 是頭管角,由水平方向順時針量測
- 是前叉偏移量(rake)



增加曳距的方式有增加前輪半徑、減少頭管角或減少前叉偏移量。
傳統自行車的曳距越大,在騎乘時會越穩定[42],不過曳距太大會讓自行車不容易轉向。若自行車的曳距為負(前輪轉向軸延伸到地面的點,在前輪和地面接觸點之後),雖然仍然可以操控,但目前有的資訊是非常不穩定。一般而言,公路賽車自行車的曳距會比旅行自行車要大,但比登山自行車要小。登山自行車的頭管角比公路自行車要小,以提升在下坡時的穩定性,因此其曳距較大。旅行自行車的曳距較小,讓駕駛者用所載行李較低的重心使車輛平衡,因此沒有行李的旅行自行車可能會較不穩定。自行車的前叉一般會是彎曲的,在靠近前輪軸的部份會轉為較水平的角度,使前輪轉向軸較接近垂直,讓曳距可以比較小[43]。有些自行車會有負曳距(例如Python Lowracer),也可以騎,有些實驗性的負曳距自行車,其實驗結果也可以自穩定[1]。
在摩托車中,rake會指其頭管角(head angle),會用三叉樹(triple tree)產生的位移來降怟曳距[44]。
Whitt及Wilson的小型研究指出[29]
- 旅行自行车的頭管角在72°至73°之間,曳距約在43 mm至60 mm之間。
- 公路自行车的頭管角在73°至74°之間,曳距約在28 mm至45 mm之間。
- 場地自由車的頭管角為75°,曳距約在23.5 mm至37 mm之間。
特定自行車的曳距也會因為一些原因而改變。若前輪有懸吊系統的自行車(特別是伸縮式前叉),若因為車較重而壓縮前叉,會使轉向軸角度變陡,會降低曳距。曳距也會因為傾斜角及轉向角而變化,若自行車直立,往前行時,會是最大值[45]。若傾斜角及轉向角夠大,曳距有可能變為零,這也會影響駕駛者控制車輛平衡的能力[11],前輪的輪組也會影響在有傾斜角及轉向角時,曳距的變化情形。
有另外一種類似曳距的量測方式,稱為mechanical trail、normal trail或true trail[46],是轉向軸到前輪接觸面形心的垂直距離。
軸距
軸距(wheelbase)是影響方向穩定性的因素之一,是指前輪和後輪對地接觸面之間的水平距離。由於干擾影響,前輪有一定的位移,偏離原定路徑的角度和軸距成反比[9]。特定轉向角(steer angle)和傾斜角的曲率半徑也和軸距成正比[9]。若自行車傾斜而且有轉向,其軸距會變長。最極端的情形是傾斜角為90°,軸距會因為前輪及後輪的半徑而增加[11]。
轉向機構質量分佈
另一個在傳統自行車設計中會對自平衡有幫助的因素是轉向機構(包括前輪、前叉及車把)中的質量分佈。若轉向機構的質心是在轉向軸的前面,重力的推力也會讓前輪轉向傾斜的方向。這可以由將靜止的自行車傾斜即可看出。不論和地面是否有交互作用,前輪通常都會往傾斜的方向轉向[47]。另外的參數,例如質心相對前後的位置,以及質心的高度也會影響行車的動態平衡[29][47]。
陀螺效應
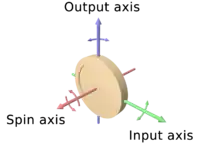
大部份自行車中陀螺效應的角色是幫助自行車的前輪轉向傾斜的方向。這稱為進動,進動率和其旋轉速率成反比。前輪轉的越慢,自行車在傾斜時前輪進動的會越快,反之亦然[48]。 後輪不會進動,因為前輪是受到地面對輪胎的摩擦力影響,就算沒有自旋也會繼續傾斜。因此陀螺力無法提供阻止腳踏車翻倒的力[49]。
在前進速度較慢時,前輪的進動速度太快,因此自行車會有過度轉向(oversteer)的情形,會開始往另一邊傾斜,會讓自行車左右晃動甚至翻倒,屬於不容易操控的情形。在較高速時,前輪的進動速度太慢,自行車會有轉向不足(understeer)的情形,無法到直立的位置,自行車也會翻倒[11]。此不穩定性很慢,是以秒為單位,對大部份的駕駛者都容易counteract。因此自行車速度較快時,駕駛者會覺得容易操控,雖然自行車當時無法自穩定,若不受控的話,其實也會翻倒。
陀螺效應的另一個效果是前輪在反向操舵時產生的滾動矩,例如,向左轉彎會生一個向右的矩,相較於前輪產生的矩,向右的矩其實不大,但只要駕駛者開始對車把施加轉矩,就會出現這個矩,在機車賽車時很有幫助[9]。
自行穩定
在上述兩個不平衡的情境之間,因著曳距、質量分佈、陀螺效應等因素的影響,會有一段前進速度的區間,在此區間內可以使特定設計的自行車在不受控的情形下維持直立[2]。已經證實陀螺效應或正曳距既不是自行穩定的必要條件,也無法透過這二個達到自行穩定,不過這二個效應對未握手把時的控制有幫助[1]。
不過,就算自行車無法自行穩定,也可以透過車把控制前輪轉向的方式來達到平衡[6],而上述這個可能可能形成自行穩定的效應,也可能會被其他因素所蓋過,例如車頭碗的摩擦力,或是很硬的牽動拉線[29]。
縱向加速度
有關縱向加速度對側向動力學之間的複雜關係,已經有相關的研究證實。在一個研究中,正的加速度消除了自平衡的能力,而負加速度會改變自平衡時的速度[7]。
轉彎


為了要讓自行車轉彎,改變其前進的方向,和所有用前輪調整方向的車輛一樣,需將前輪轉到接近前進的方向的位置。地面和輪胎之間的摩擦力會產生轉彎需要的加速度,是轉彎力及弧度推力合成的結果。在轉向角較小時,自行車直立(不傾斜)時的轉彎半徑為:

其中
- 是近似的半徑
- 是輪距
- 是車把的轉向角
- 是轉向軸的後傾角(caster angle)[9]




傾斜
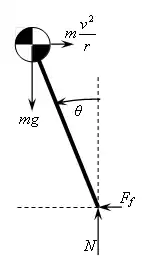
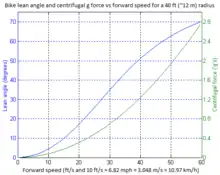
不過自行車和其他有輪子的車輛不同,為了平衡重力、慣性力、摩擦力及地面的支持力,自行車在轉彎時必須傾斜。其傾斜角θ可以用以下圓周運動的定律來計算。

其中v是前進速度,r是轉彎半徑,g是重力加速度[48]。這是理想的例子。若考慮相同的速度及轉彎半徑,輪胎寬度是現代的標準寬度,當傾斜角略為增加時,自行車騎士就需要自行補償其施力[45]。
不過可以證實,利用簡單的二維模型,在本質上說就是在旋轉盤上的倒單擺,就可以預測穩態的轉彎是不穩定的。若自行車的傾斜角較平衡時的傾斜角要大一點,重力產生的力矩增加,向心力減少,位移會放大。更複雜的模型會允許一個輪子轉向,調整路徑,並且對抗重力產生的力矩,真實的自行車需要此一機制才能有自平衡的能力。
例如若自行車在旋轉半徑10公尺的圓周上轉彎,速度10 m/s(時速36公里),其傾斜角需要是45.6°。自行車駕駛者若想要的話,可以讓車輛(或是身體)傾斜多一點或是少一點。重要的角度是水平面和另一個平面的夾角:是輪胎接觸點以及車輛和自行車駕駛者此系統的重心所定義的平面。
自行車的傾斜會減少轉彎的旋轉半徑,減少量和傾斜角的餘弦成正比。所得半徑可以近似如下(誤差值2%):

其中r是近似半徑,w是輪距,θ是傾斜角,δ是轉彎角,而φ是轉向軸的轉向軸的後傾角[9]。當自行車傾斜時,輪胎接觸面更往輪胎的側邊移動因此會造成磨損。摩托車輪胎的側邊,若轉彎時沒有受到磨損,有時稱為是chicken strips。
輪胎的有限寬度會影響後輪實際的傾斜角,和上述所列的不同。實際的傾斜角會隨著輪胎寬度增加,隨質心高度而減少。有較寬輪胎、重心較低的車,在相同車速、相同轉彎下的傾斜角會比較大[9]。
若輪胎寬度為2t,傾斜角的增加量為

其中φ為實際的傾斜角,h為質心高度[9]。
可以證明重力及地面的反作用力產生的力偶是自行車轉彎時必須的。有一個實驗設法抵消此一力偶,自行車和駕駛者可以在直線行駛時維持任意的傾斜角,因此無法轉彎。只要輪子的方向偏離原來的方向時,自行車和駕駛者會往反方向傾斜,因此唯一可以正常駕駛的方式就是直線行駛[50][51]
穩定的轉彎
在開始轉彎後,維持自行車在固定轉彎半徑、固定速度下轉彎需要的力矩會隨車速、車輛幾何及質量分佈有關。[11][24]。若車輛速率低於capsize速度(在以下特徵值的章節會提到,也稱為反轉速度)。除非施加和轉彎相反的力矩,不然自行車的自穩定性會使車輛轉彎、自行轉直,之後結束轉彎。若速率超過capsize速度,除非在轉彎方向加力矩,不然capsize不穩定性會讓自行車離開轉彎,增加傾斜度。若在capsize速率,可以在沒有施加力矩下轉彎。
轉向角
為了要維持穩定的轉彎,轉向角(車頭延著轉向軸旋轉的角度)會受到許多因素的影響。其中有些是單軌車輛特有的,有些是其他車輛也會有的。在條目中有說明過這些效應,再重列在此段落中,以下的順序不代表各效應的重要性。
第一點,實際的動態轉向角(車頭旋轉投影到道路上的角度)是轉向角以及轉向軸後傾角角度的函數:

其中是動態轉向角,是轉向角,是轉向軸的後傾角[9]。

第二點,自行車的傾斜角會減少實際的旋轉半徑,減少量和傾斜角的餘弦成正比。所得的半徑大約可以近似如下(誤差在2%以內):
其中是近似半徑,是輪距,是傾斜角,是轉向角,是轉向軸的後傾角[9]

第三點,因為前輪和後輪可能由於重量分佈、輪胎特性等原因,有不同的偏滑角,自行車可能會有轉向不足或是轉向過度的情形。若轉向不足,轉向角應該要更大。若轉向過度,轉向角應該要更小[9]。有些作者用 counter-steering 指自行車在某些情形下需要將車頭轉往要轉向方向相反的方向(逆轉向角),以反應顯著的後輪滑移[9]。
第四點,要產生使自行車偏離其路徑的向心力,所需要的弧度推力,以及因為偏滑角產生的轉彎力,可能是影響轉向力大的因素[45]。弧度推力讓自行車可以和車輛一樣以相同的轉彎半徑轉彎,但其轉向角可以比較小[45]。當自行車有人駕駛,且依相同方向傾斜,前輪的弧度角會比後輪的大,因此在其他條件相時,可以產生較大的弧度推力[9]。
利用調整重心轉彎
反向操舵一般是直接在車把上施加力矩,若是較輕的車,也可能透過讓駕駛者的重心往旁邊偏來得到效果。若駕駛者往車的右邊偏,車會往左邊偏來滿足角動量守恆,結合的重心會幾乎在原來的位置上。此時左偏的自行車(在一些文獻中會稱為counter lean[45])會讓車往左轉,就像駕駛者使用反向操舵之技巧時,用在車把上加力矩左轉來開始右轉的動作一樣[48]。若再考慮車前碗摩擦力及較緊的控制線,此技巧的分析會更加複雜。
當駕駛將身體往右偏時,駕駛和自行車的重心會略往左移一點點,而自行車會往右傾斜。此動作會讓輪胎往右移,但因為輪胎和地面摩擦力,無法往右,因此會施力讓重心往左移。不過,這個效應很小,大部份的人很難只靠此方式讓自行車平衡不倒下。
陀螺效應
如同平衡章節所述的,旋轉前輪產生的效果之一就是因為陀螺進動引起的滾勳矩。矩的大小和前輪轉動慣量、前進速率、駕駛在車把加力矩轉動前輪的角速度、轉向軸和垂直線夾角的餘弦成正比[9]。
假設自行車行進速度22 m/s,前輪轉動慣量0.6 kg·m2,轉動前輪的角速度是半秒旋轉一度,其滾勳矩為3.5 N·m。相對而言,前輪的側向力最大可到50 N。作用在0.6 m高的重心上,產生的滾勳矩為30 N·m。
陀螺效應產生的矩雖然只有12%,但這是駕駛施加力矩就立刻會出現的矩,在機車賽車上有重要的意義。
輪胎
輪胎對自行車的操控性有很大的影響,尤其在摩托車上[9][45],在自行車上也是[7][52]。輪胎的影響有二個方面:有限的胎冠半徑,以及產生力的方式。增加前輪的胎冠半徑會減少自穩定性,或甚至完全抵消。增加後輪的胎冠半徑的效果相反,不過比較不明顯[7]。
透過產生轉彎力及弧度推力,輪胎可以提供轉向或是平衡需要的側向力。輪胎充氣的壓力是機車在高速時是否可以平衡的重要因素之一[53]。因為重量分佈、輪胎特性等因素的不同,前輪和後輪可能會有不同的偏滑角,因此自行車可能會有轉向不足或是轉向過度的情形。轉向不足是指前輪的偏滑角比後輪大,因為前輪的轉向在維持平衡的過程中非常重要,轉向不足的危險性比轉向過度要高[9]。因為真實的輪胎其可以產生scrub轉矩的接觸地面面積有限,因此在滾動時可能會出現側滑(side-slip),出現延著接觸地面面積法線旋轉旳力矩。
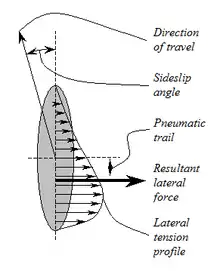
輪胎會產生自對正力矩,這是因為接觸地面面積的邊在側滑時的非對性造成。所得側滑的轉彎力是在接觸地面面積幾何中心的後面出現,稱為氣動曳距,也會產生力矩。因為側滑方向是朝向輪子的外部,輪胎的力是從轉彎的中心。因此,轉矩會讓前輪往側滑的方向轉,遠離轉彎的方向,會加大轉彎的旋轉半徑。
另外一種轉矩是因為接觸面積的有限寬度以及輪胎在轉彎時的傾斜造成的。在轉彎時接觸地面面積的較外側部份,因為從輪轂外往外算的距離較其他部份要長,因此相對輪轂向後移動的速度比其他部份要快。依照相同的推論,接觸地面面積的較內側部份往後移動的速度較慢,這兩部份的力方向相反,因此會產生力矩,讓前輪轉向傾斜的方向,因此會減少轉彎的旋轉半徑。
這兩種力矩的組合,使得前輪會產生偏擺(Yaw)力矩,其方向和輪胎側滑角、輪胎實際路徑以及指向方向之間夾角、以及輪胎和垂直線的夾角有關[9]。產生的力矩會使得其反轉速度會比剛體輪胎模型所計算的要小[11]。
操控性
自行車的操控性(maneuverability)及handling很難量化,原因有以下幾點:自行車的幾何,特別是轉向軸的角度,讓運動學分析格外的複雜[2]。自行車在許多情形下是不穩定的,一定需要透過駕駛控制。在操控自行車時,駕駛者的技術對自行車的性能有很大的影響[9]。自行車的設計需要在操控性和穩定性之間進行取捨。
駕駛者的控制輸入
駕駛者可以提供的控制輸入是在車把上,施加給轉向機構旳力矩。因為自行車其轉向幾何及陀螺效應產生的動態,已確定直接控制轉向角會有許多問題[8]。
另一個駕駛者可以提供的控制輸入是將其上半身的身驅往某一方向傾斜。如上所述,傾斜的效果和自行車的質量成反比。若車輛比較重(例如重型機車),駕駛者為了要轉彎,身體可能會有相當大的傾斜,增加路面的視野[8]。在機車的賽車中,在轉彎時賽車手會傾斜身軀、移動身體,將內側的膝蓋伸出,這些動作也可以產生空氣動力學上的偏擺力矩,讓機車可以進入轉彎彎道[9]。
和汽車的差異
自行車及機車在測試時,為了避免讓駕駛受傷,也避免使車輛受損,多半會維持車輛的直立,這也限制了一般會進行的操控性測試。例如,汽車玩家的雜誌常會對汽車進行打滑測試,但多半不會針對機車進行類似測試。機車要預備轉彎,將機車傾斜到適當的角度,代表駕駛者需要比一般汽車在相同速度下看的更深,若機車速度越快,駕駛者就需要看的更深[8]。
評價方式
有幾種評價方式可以評價機車的操控性[9]。
- roll index是轉向力矩和傾斜角之間的比例。
- 加速指數(acceleration index)是轉向力矩和側向加速度(或向心加速度)之間的比例。
- 轉向比例(steering ratio)是理想輪胎行為下的轉彎半徑,和實際轉彎半徑的比例[9]。若數值小於1,前輪的側滑比後輪要大,這稱為轉向不足(Under-steering)。數值等於1表示是中性轉向(neutral steering),大於1是轉向過度(over-steering)。若數值小於0,表示前輪需轉向和轉彎方向相反的方向,稱為counter-steering。駕駛者一般會維持中性轉向或是輕微的轉向過度[9]。汽車駕駛多半會維持轉向不足。
- 科赫指數(Koch index)是轉向力矩的最大值,除以最大傾斜率及行進速度乘積後的比例[54][55]。大型旅行摩托車的科赫指數較大,而运动型摩托车科赫指數數值在中間,速克達的科赫指數會比較小[9]。要操控速克達也比要操控重型機車要來的容易。
側向運動理論
自行車及摩托車的運動方程雖然可以線性化,但本身是非線性系統。要求解的變數無法表示為獨立成份的線性和,也就是說,其行為無法表示為許多獨立行為的組合[2]。一般而言,非線性系統很難求解,相較於線性系統,非線性系統也比較不容易理解。在理想的情形下(不考慮摩擦力及彎曲),自行車是能量守恆的系統。不過實務上會看到阻尼的效果。在適當的條件下,自行車的左右晃動會隨時間而減少。側向顛簸加在直立自行車上的能量使得其速度更快,而晃動會越來越小(自穩定)[2]。
自行車是非完整系統,其輸出和路徑有關。為了要知道其確切的組態(特別是位置),不只要知道各組件目前的狀態,也需要知道其過去各時間的狀態,這使得數學分析變的複雜[48]。若依控制理论的術語,自行車是非最小相位系統[56],車輛最終的轉向會和一開始的轉向不同(即為反向操舵)。
自由度
自行車的自由度會因為選用的模型不同而不同,最簡單的模型為Whipple模型,得名自最早發現模型的Francis Whipple[2],此模型掌握了自行車最重要的特徵,模型中有四個剛體,輪子的邊假設為沒有寬度的刀邊,在光滑表面上滾動,不會滑動,此模型有七個自由度(完全描述四個剛體位置以及方向時,所需要的組態變數)[2]:
- 後輪對地接觸點的x軸坐標
- 後輪對地接觸點的y軸坐標
- 車框的方向角(偏擺角,yaw angle)
- 後輪沿軸旋轉的角度
- 前輪沿軸旋轉的角度
- 車框的傾斜角(滾轉角,roll angle)
- 車框和前輪之間的轉向角
若要在模型上再增加複雜度、例如騎乘者的運動、懸吊系統的位移、輪胎順應性(tire compliance)或是框架彎曲(frame flex),都會增加系統的自由度。若在傾斜及轉向時,車框有偏擺角,會因為兩輪都要在地面的限制條件,偏擺角沒有自由度,可以由其他七個變數來計算。若忽略自行車位置以及輪子的轉動,也就可以省略上述前五個自由度,自行車可以只用二個變數來描述:傾斜角及轉向角。
运动方程
理想自行車的條件如下:
- 剛體的车架
- 剛體前叉
- 二個刀邊(無厚度)、剛體車輪
- 其軸承無摩擦力,輪子在光滑水平平面上滾動,沒有摩擦力也不會滑動
- 自行車在在直立或是幾乎直立的不穩定平衡情形下行駛
其运动方程可以用二個四階線性化常微分方程表示,或是二個耦合的二階微分方程表示[2],其傾斜角為

而轉向角方程為

其中
- 是車框的傾斜角
- 是前輪相對車框的轉向角
- 分別是是施加在車框及轉向矩上的力矩。若是分析不受控的自行車,此項為零




可以表示為以下的矩陣形式

其中
- 為對稱的質量矩陣,其中只和自行車質量及幾何有關
- 為所謂的阻尼矩陣,雖然理想自行車沒有能量耗散,這項和前進速度關,也是對稱矩陣
- 為所謂的剛性矩陣,包括了重力常數以及有關的項次,項次對稱,而項次反對稱
- 是傾斜角及轉向角組成的向量
- 是外力(外部產生力矩)的力量。








在理想及線性化的方程中,有許多和自行車幾何有關的參數(軸距、頭管角、各部份質量、輪徑等),但只有四個變數:傾斜角(lean angle)、傾斜角變化率(lean rate)、轉向角(steer angle)及轉向角變化率(steer rate)。這個方程已由許多獨立完成的數值模型驗證過[2]。
從方程式可以看出:自行車在側向位置類似倒單擺,在其支持點是由表示傾斜加速度、傾斜速度、傾斜角度的項控制,為轉向力矩的回授。傾斜加速度項的正負號和自行平衡的正負號恰好相反,在擺振(wobble)振盪中很重要。傾斜速度回授的正負號正確,和陀螺效應有關,和速度成正比,由前輪運動所主控。傾斜角度項是最重要的一項,主要是由曳距(trail)、前叉偏移量(rake)及前輪質心相對轉向角的偏移量有關。這三項都和複雜的自行車設計參數有關,有些也和速度有關。此自行車模型有些限制,可以再擴展,考慮輪胎的處理、車框以及駕駛者[57]以及其相關的關係。也有文獻探討最佳的駕駛者穩定度控制,以及路徑追隨控制[7]。
特徵值
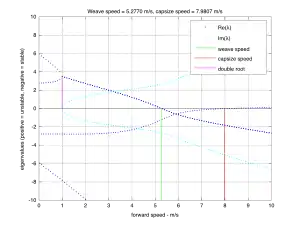
可以繪出特定自行車,線性狀態方程式下的四個特征值(每一個對應一個狀態變數,即傾斜角、傾斜角變化率、轉向角及轉向角變化率)對前進速度的變化,以分析其简正模以及自穩定性。在右圖中,繪出前進速度從0–10 m/s範圍的特徵值。若所有特征值的實部(圖中深藍色線)都為負,自行車可以自穩定。若特征值有不為0的虚部,表示自行車會振荡。特徵值是對原點對稱的,因此自行車設計時,在前進速度某一範圍內可以自平衡,但在以相同速度後退時,無法自平衡[2]。
在圖中有三個不同的速度點,自行車在這三個點的行為有明顯的變化[2]:
- 開始振荡的前進速度,此例中約在速度為1 m/s時,這是因為特徵多項式中有出現重根(特徵多項式中有二個特徵值恰好相等)。此速度以下,自行車會像倒單擺一樣的倒下。
- 振荡不會變大的速度,此時迂迴擺動(weave)模態的特征值由正變負(霍普夫分岔),此例中約在5.3 m/s,此速度稱為weave速度。若速度低於此速度,自行車的振荡會變大,若是未受控的自行車,最後會倒下。
- 非振盪的傾斜角會增加的速度,此時傾倒(capsize)模態的特征值由負變正(叉分岔),此例中約在8 m/s,此速度稱為傾倒速度(capsize speed)。若是未受控的自行車,超過此速度時,傾斜角會以非振盪的方式漸漸增加,最後自行車會倒下。
在weave速度及傾倒速度(若兩者都存在的話)之間,有一段速度範圍內,自行車可以自穩定。在此例中,特徵值隨速度的變化如上,自穩定的速度範圍為5.3–8.0 m/s。第四個特徵值多半是穩定的負值,是前輪的castoring特性,是自行車在行進時傾向轉彎方向的能力。上述的理想模型中沒有擺振或後輪擺振的不穩定性。這些是輪胎和地面的交互作用或是其他自由度的運動所產生的[9]。
目前真實自行車的實驗證實了特徵值預期的迂迴擺動(weave)模態。也發現若速度超過6 m/s,輪胎的滑動以及框架彎曲(frame flex)的特性對側向動態的影響會比較小[58]。上述計算特徵值的理想模型沒有考慮真實輪胎會產生的力矩,另外輪胎和路面之間的交互作用無法避免高速下傾倒(capsize)模態的不穩定,如同Wilson和Cossalter認為,真實世界所發生的情形一樣。
模態
自行車和其他複雜旳機械一樣,有許多的模態:其基本的運動特性。模態可以分為穩定或不穩定,依自行車參數及前進速度而定。這裡提到的「穩定」指的是未受控的自行車只要維持速度,就可以繼續前進,不會倒下,而「不穩定」指的是未受控的自行車就算維持速度,最終仍然會倒下的情形。模式可以依其平衡穩定的速度,以及當時傾斜及轉向的情形而定。任何的自行車運動都是由許多模態組合而成,模態主要有三種:傾倒(capsize)、迂迴擺動(Weave)及擺振(wobble)[2]。有一種稱為後輪擺振(rear wobble)的模態比較少見,多半也不穩定[9]。
傾倒
傾倒(Capsize)是指自行車沒有振盪,直接倒下的情形。傾倒時,不受控的前輪會轉向傾斜的方向,但轉向不足,無法使傾斜的情形減緩或停止,一直到傾斜角很大的時候為止,那時轉向角會轉向相反的方向。若自行車快速前進的話,傾倒的速率會很慢,因為傾倒不平衡的速度很慢,約是以秒為單位。對駕駛者來說很容易控制,其實上駕駛者也會在要轉彎前,刻意產生小幅的傾倒,以產生要開始轉彎需要的傾斜角[9]。
大部份的自行車,在低速下的傾倒是可以穩定的,但若速度越低,穩定程度就會變差,最後會變不穩定。不過在許多自行車中,高速時輪胎和地面的交互作用已可以避免不穩定的傾倒[9][11]。
迂迴擺動
迂迴擺動(Weave)一詞用來描述在車往左傾斜,往右轉向時的振盪(反之亦然)。自行車會受到轉向角(steering angle)、傾斜角以及方向角(heading angle)明顯變化的影響。此時,轉向角和方向角差180度,而和傾斜角差90度[9]
依自行車幾何以及質量分佈不同,大部份的自行車在低速迂迴擺動時無法自行穩定。前進速度增加時,不穩定情形會改善,到一定速度就可以穩定了。前進速度增加時,振盪振幅會變小,但振盪頻率會變大[16]。
擺振
擺振(Wobble)或速度擺振是描述一種主要在自行車前半部(前輪、前叉及握把)的快速振盪(約4–10 Hz)。若自行車撓性太高,後車架的yawing也可能會造成擺振[59]。這種不穩定最常出現在高速時,類似賣場推車輪子、飛機起落架及汽車前輪會有的振盪[9][11]。若透過調整速度、位置或是調整握握把的位置,很容易改善擺振情形,但若不調整,會讓自行車倒下[60]。
擺振會在出現一些小幅不規則時出現,例如前叉的不對稱[61]、讓輪子加速往某一側移動。車輪的恢復力和不規則的作用力恰好同步,輪子會因此轉向。若轉向阻尼不足,振盪會因此變大,最後系統會失效。若改變行進速度,讓自行車的剛性變高或是變輕,或是增加轉向的剛性,擺振頻率也會變化[17][29]。
後輪擺振
後輪擺振(rear wobble)是描述一種傾斜角和方向角幾乎同步,和轉向角差180度的振盪。振盪速率中等,在約6.5Hz振盪速率會到最大值。若速度上昇,後輪擺振會有很強的阻尼,最後自行車會快速倒下[9]。
設計準則
自行車設計參數在這些模態上的效果,可以由線性方程中特徵值的變化看出[53]。在上述運動方程章節有進一步有關運動方程及特徵值的說明。以下是一些通用性的結論。
後車架及輪軸的側向剛性及扭轉剛性實際上會影響擺振模態的阻尼。長軸距、長曳距及較平的頭管角可以增加擺振模態的阻尼。若將摩托車前叉扭轉軸儘量放低,可以克服側向的抖動。
Cornering迂迴擺動的傾向會因為後輪懸吊阻尼的減弱而增強。Cornering、外彎剛度及後輪的鬆弛長度(relaxation length)對迂迴擺動的阻尼影響最大。前輪的相關參數影響較小。後輪的載重會放大迂迴擺動的傾向。不過後輪的載重若配合適合的剛性以及阻尼,可以減小擺振及迂迴擺動。
有個研究在理論上證明,在自行車轉彎時,若道路起伏剛好對應車輛速度以及其他參數,可能會在高速激發迂迴擺動模態,或是在低速激發擺振模態。若有有效的轉向阻尼,可以減小擺振。而駕駛者若比較輕,比較不會激發迂迴擺動模態[14]。
在跑步機及滾筒上行駛
自行車在跑步機行駛的情形理論上和在固定路面上行駛的情形相同。實際測試結果也是如此[62]。目前已有設計特別為室內自行車訓練用的跑步機[63][64]。自行車在滾筒行駛的動力學是目前仍在研究的主題[65][66][67]。
其他的假設
自行車及摩托車大致可分為四個主要部份(車架、前叉及二個輪子),看起來似乎是很簡單的機械,但由於其組成方式,使得分析相當困難[29]。目前可以觀測到自行車在沒有陀螺效應的情形下仍可以行駛[5][6],但很多網路及書籍中仍會提到自行車是因為陀螺效應才能穩定的假說[5][48]。
例如以下的文獻就有提到上述假設:
- Angular momentum and motorcycle counter-steering: A discussion and demonstration, A. J. Cox, Am. J. Phys. 66, 1018–1021 ~1998
- The motorcycle as a gyroscope, J. Higbie, Am. J. Phys. 42, 701–702
- The Physics of Everyday Phenomena, W. T. Griffith, McGraw–Hill, New York, 1998, pp. 149–150.
- The Way Things Work., Macaulay, Houghton-Mifflin, New York, NY, 1989
縱向力學

自行車也會受到縱向力,以及縱向的運動。大部份的自行車,若前輪略為左彎或是右彎,整個後車架會略為前移,依後傾角及曳距而不同[9][47]。若是有懸吊系統的自行車,會用trim來描述自行車的幾何構形,特別是自行車對煞車、加速、轉彎、傳動系統施力,以及空氣阻力的反應[9]。
二個輪子所承載的重量和質量中心位置有關(這部份和駕駛者及行李的重量及位置有關),也和自行車的加減速有關。這稱為負載轉移[9]或重量轉移[45][68],視文獻而不同。這種現象對自行車設計者及駕駛者是挑戰,但有時也是優勢。例如摩托車賽車手可以用此效應增加轉彎時前輪的摩擦力,在重剎車時設法減少前懸架壓縮量的想法也產生了許多摩托車前叉的設計。
總空氣阻力可以視為只作用在一個點上,稱為壓力中心[45]。高速時,總空氣阻力會產生對後輪的力矩,使負載從前輪移至後輪[45]。依自行車的車型不同,是否有安裝整流罩以及其位置,可能會產生空氣升力,可能減少前輪的負載,也可能增加其負載[45]。
穩定性
自行車在靜止時在縱向是穩定的,但在特定的加速或減速條件下,可能會由穩定變為不穩定,歐拉第二運動定律可以分析地面產生的反作用力[69]。例如軸距為,重心高度為,重心距後輪的水平距離為的自行車,在兩輪鎖死時,地面所產生的垂直反作用力為[9]



- (後輪)

(前輪) 其摩擦力為

- (後輪)
- (前輪)


其中是摩擦係數,是自行車和駕駛的總质量,是重力加速度。因此,若



意思是重心和前輪接觸點所連直線,對水平角夾角等於或超過以下角度[45]

則後輪的正向力會為零,此時後輪不接觸地面,自行車會翻倒。
另外,若重心和前輪接觸點所連直線夾角小於以上角度(例如協力車、長軸距的臥式自行車或是汽車),前輪不太可能產生足夠讓車輛翻倒的剎車力矩。意思是可以輪胎和地面產生的最大摩擦力進行減速,若摩擦係數是0.8,剎車的減速到可以到0.8 g,比一般的自行車最好的剎車情形還要多40%。《自行車科學》(Bicycling Science)的作者David Gordon Wilson指出這代表一般自行車跟在汽車後面時,有因為緊急剎車而撞上汽車的風險[70]。
而機車可以由後輪產生夠大的剎車力矩,使前輪離開地面,此一動作稱為蹺前輪。其分析方式類似,由重心位置相對後輪接觸點、摩擦力及剎車力矩決定是否會蹺前輪[45]。自行車的剎車力矩小很多,不過也會出現類似情形,若在踏板上提供動力時,重心夠後面、多高,或是騎乘者向後傾斜,就有可能讓使前輪離開地面[71]。
地面的角度也會影響上述的計算。上述條件都一樣,在上坡時蹺前輪的風險降低,而下坡時的風險會比較高[71],這是在機車拉豪比賽時的主要考量因素之一。
煞車和地面反作用力的關係
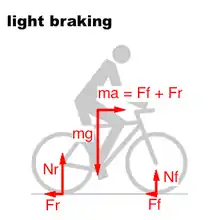
駕駛者剎車是目的是要改變駕駛者和自行車總重m的速度,會產生在行駛方向上的反向加速度a。F=ma,加速度會在質量m上產生往前的慣性力F。 剎車的加速度a可以由初始速度u、最終速度v、經過時間t求得。方程式u - u = at意味者 加速度越大,改變速度需要的時間越短。若加速度是在路面條件上可允許的最大加速度,剎車距離s也會是最小值,s = ut - 1/2 at2,當a是最大值,t是最小值時,s會是最小值。
二個車輪的剎車力分佈會依地面條件、車輪的重量分佈而定。總剎車力不會超過駕駛者和自行車總重,和輪胎和地面摩擦係數μ的乘積,mgμ >= Ff + Fr。若Ff除以Nf的值超過μ,或Fr除以Nr的值超過μ,就表示有打滑的情形,後輪打滑對側向穩定度的影響比較小。
在剎車時,慣性力ma是往進行方向,和剎車力f不一定共線,會將m轉向f的方向。這個停轉矩(overturning moment)會和mg產生的轉矩平衡。
考慮任意時間下,相對於前輪接觸點的轉矩:
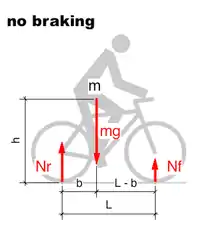
- 若沒有煞車時,質量m多半會在後輪支架前面,和後輪距離約是前後輪距1/3的位置,此時Nr會大於Nf。
- 若定速輕微煞車(不論是不需要緊急煞車的情形,或是因為路面條件,無法重煞車的情形),大部份的重量仍在後輪,因此Nr仍然很大,會產生往a方向的力Fr。
- 若煞車減速度a變大時,因為矩mah會隨著a變大,Nr和Fr都會減小。在最大的減速度a時,順時針力矩和逆時針力矩平衡,此時Nr = 0。若Ff更大,就會出現翹後輪的情形。
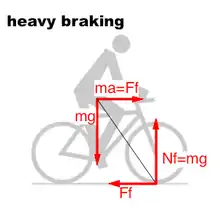 最大煞車減速度時,Nr = 0
最大煞車減速度時,Nr = 0
其他因素:
- 下坡比較容易翹後輪翻倒,因為斜度讓mg的作用線較接近f。若要減低此一傾向,駕駛者可以試著使重心往後方移動。
- 若煞車力道漸強時,重心m的位置可能會往前輪移動,駕駛者也會坐在車輛漸前面的位置,因此調整了自行車的幾何。若自行車的前輪有懸吊系統,前叉會因為受力而往下壓比較深,改變自行車幾何。因此會讓前輪有額外的負載。
- 在剎車行為結束後,駕駛者和自行車靜止,懸吊系統的壓縮量會減少,使駕駛者的位置再往上移。
摩擦係數μ的數值會因為以下因素而影響:
- 地面或是路面的材質。
- 路面的乾濕
- 路面光滑或是粗糙
- 路面的鬆緊
- 車輛的速度,摩擦力在50 km/h以上會降低
- 摩擦是滾動摩擦還是滑動摩擦,滑動摩擦會比滾動摩擦的最大值要少10%[72]。
煞車

自行車大部份的剎車力是來自前輪。如以上分析所述的,若自行車剎車系統夠強大,後輪很容易打滑,而前輪可以產生夠大的剎車力,甚至會讓車輛和騎士以前輪為軸心旋轉。此時後輪離地,若車輛沒有翻倒,則稱為蹺後輪。不過較低或是較長型的車輛,例如cruiser motorcycles[73]或臥式自行車。前輪比較容易打滑,可能會失去平衡。若沒有失去平衡,可以依照車輛的幾何、重心位置以及最大摩擦係數計算最大的剎車性能[74]。
若車輛的前叉有懸吊,特別是伸縮叉管,會因為往下的力增加而壓縮懸吊系統,使車輛的前面變低。這稱為「俯衝煞車」(brake diving)。有一種騎車的技巧,利用剎車時所增加的往下力量,此技巧稱為循迹刹车。
前輪煞車
前輪煞車力的限制因素有:
若自行車直立,在乾燥柏油路面上,煞車系統很好,騎乘者的俯仰位置可能會是限制因素。騎乘者和車輛的重心在前輪和地面接觸點後60公分,上方120公分,煞車減速度可以到0.5 g(5 m/s2)[29]。若騎乘者讓重心往後往下,可能可以有更大的煞車減速度。
不過大部份便宜的自行車前輪煞車不夠強壯,因此在行駛時,煞車本身會成為限制因素。便宜的懸臂剎車,以及羅利式側拉剎車嚴重限制了剎車力。在濕的路面上效果更差。在非正常路面上行駛時,常有前輪打滑的情形。泥濘、水或是路上鬆動的石頭都會降低煞車力,不過粗胎在不規則的路面上抓地力較好,煞車力的影響較少。在轉彎時也常會有前輪打滑的情形,不論是否在正常路面上都是如此。向心加速度會增加輪胎和地面的接觸力,若產生的摩擦力超過一定值,就會有打滑的情形。
懸吊系統

自行車可能只有前輪或後輪有避震系統(懸吊系統),也有可能兩輪都有,或是兩輪都沒有,若有避震系統,多半會在中心對稱面上,不過有些會考量其側向的可撓性[45]。避震系統的目的是減少駕駛者受到的震動、維持車輛和地面的接觸、在意外輾過物體時減少動量損失、減少因為路面不平造成的衝擊力,並且維持車輛trim[9]。懸吊系統主要的參數有剛度、阻尼比、簧上質量及簧下質量,以及輪胎特性[45]。煞車、加速度、傳動系統的力也會引發懸吊系統的反應。例子包括自行車上的bob及踏板回踢,機車上的軸效應,自行車和機車上的squat和brake dive。
振動
自行車及機車振動的研究包括其來源,例如引擎平衡[79]、轮胎平衡、地面、空气动力学、車輛的傳動及摩擦、以及振動對車輛、駕駛者及安全性的影響[80]。振動分析中很重要的是比較系統的基本頻率以及可能振動源的振動頻率[81]。若二者接近,表示可能會出現共振,讓振動的振幅持續變大。振動阻尼器設計時,一方面需要在特定方向(例如垂直方向)有隨受力變形的順應性,但又不能犧牲動力傳動以及轉向(扭转)需要的框架剛性[82]。另一個和振動有關的問題是可能會因為金屬疲勞而讓零件失效[83]。振勳對駕駛者的影響有不適、失去平衡、手-手臂振動症候群(續發性的雷諾氏症候群)及全身振動。在車輛上使用振動設備量測,可能不一定準確,而且不容易閱讀[83]。
實驗
為了驗證或是反證許多有關自行車動力學的假說,已進行了許多的實驗。
參考資料
- J. D. G. Kooijman; J. P. Meijaard; J. M. Papadopoulos; A. Ruina & A. L. Schwab. (PDF). Science. April 15, 2011, 332 (6027): 339–342 [2020-04-03]. Bibcode:2011Sci...332..339K. PMID 21493856. doi:10.1126/science.1201959. (原始内容存档 (PDF)于2011-05-13).
- J. P. Meijaard; J. M. Papadopoulos; A. Ruina & A. L. Schwab. . Proceedings of the Royal Society A. 2007, 463 (2084): 1955–1982. Bibcode:2007RSPSA.463.1955M. doi:10.1098/rspa.2007.1857.
- Limebeer, D. J. N.; R. S. Sharp. (PDF). IEEE Control Systems Magazine. 2006, 26 (October): 34–61 [2020-04-03]. doi:10.1109/MCS.2006.1700044. hdl:10044/1/1112
 . (原始内容存档 (PDF)于2017-08-14).
. (原始内容存档 (PDF)于2017-08-14). - Pacejka, Hans B. 2nd. Society of Automotive Engineers, Inc. 2006: 517–585. ISBN 978-0-7680-1702-1.
The single track vehicle is more difficult to study than the double track automobile and poses a challenge to the vehicle dynamicist.
- Klein, Richard E.; et al. . [2008-09-09]. (原始内容存档于2008-02-13).
- Jones, David E. H. (PDF). Physics Today. 1970, 23 (4): 34–40 [2008-09-09]. Bibcode:1970PhT....23d..34J. doi:10.1063/1.3022064. (原始内容存档 (PDF)于2017-12-18).
- Sharp, Robin S. . Applied Mechanics Reviews. November 2008, 61 (6): 060803–01–060803–24 [2020-04-03]. Bibcode:2008ApMRv..61a0803H. ISSN 0003-6900. doi:10.1115/1.2820798. (原始内容存档于2012-11-09).
- Sharp, R. S. . Journal of Dynamic Systems, Measurement, and Control. July 2007, 129 (July 2007): 373–381. doi:10.1115/1.2745842.
- Cossalter, Vittore. Second. Lulu.com. 2006: 241–342. ISBN 978-1-4303-0861-4.
- Tony Hadland & Hans-Erhard Lessing. . MIT Press. 2014: 65. ISBN 978-0-262-02675-8.
- Wilson, David Gordon; Jim Papadopoulos.
 Third. The MIT Press. 2004: 263–390. ISBN 978-0-262-73154-6.
Third. The MIT Press. 2004: 263–390. ISBN 978-0-262-73154-6. - Sharp, R. S. . Journal of Mechanical Engineering Science. 1971, 13 (5): 316–329. doi:10.1243/JMES_JOUR_1971_013_051_02.
- Sharp, R.S. . Vehicle System Dynamics. 1985, 14 (4–6): 265–283. doi:10.1080/00423118508968834.
- Limebeer, D. J. N.; R. S. Sharp; S. Evangelou. . Transactions of the ASME. November 2002, 69 (6): 724–739. Bibcode:2002JAM....69..724L. doi:10.1115/1.1507768. hdl:10044/1/1109.
- . [2020-04-20]. (原始内容存档于2016-01-16).
- Massaro, M; Lot R; Cossalter V; Brendelson J; Sadauckas J. . Vehicle System Dynamics. 2012, 50 (S1): 215–227. Bibcode:2012VSD....50S.215M. doi:10.1080/00423114.2012.679284.
- Cossalter, V; Lot R; Massaro M. . Vehicle System Dynamics. 2007, 45 (4): 313–326. doi:10.1080/00423110600976100.
- Cossalter, V; Lot R; Massaro M. . Vehicle System Dynamics. 2008, 46 (4): 339–353. doi:10.1080/00423110701416501.
- Cossalter, V; Lot R; Massaro M; Sartori R. . Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering. 2011, 225 (6): 705–720. CiteSeerX 10.1.1.1016.167 . doi:10.1177/0954407010396006.
- Cossalter, V; Lot R; Massaro M. . Meccanica. 2011, 46 (5): 943–958. doi:10.1007/s11012-010-9351-7.
- Cossalter, V; Doria A; Lot R; Ruffo N; Salvador, M. . Vehicle System Dynamics. 2003, 39 (5): 329–352. doi:10.1076/vesd.39.5.329.14145.
- Cossalter, V; Doria A; Giolo E; Taraborrelli L; Massaro, M. . Vehicle System Dynamics. 2014, 52 (10): 1333–1354. Bibcode:2014VSD....52.1333C. doi:10.1080/00423114.2014.940981.
- Biral, F; Bortoluzzi D; Cossalter V; Da Lio M. . Vehicle System Dynamics. 2003, 39 (1): 1–25. doi:10.1076/vesd.39.1.1.8243.
- V Cossalter; R Lot; M Massaro; M Peretto. (PDF). Proceedings of the World Congress on Engineering 2010 Vol II. 2010: 1257–1262 [2020-06-05]. (原始内容存档 (PDF)于2018-04-30).
- Cossalter, V; Da Lio M; Lot R; Fabbri L. . Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility. 1999, 31 (2): 113–135. doi:10.1076/vesd.31.2.113.2094.
- Cossalter, V; Massaro M; Bobbo S; Peretto M. . SAE Int. J. Passeng. Cars – Mech. Syst. 2009, 1 (1): 1311–1318. doi:10.4271/2008-01-2965. (原始内容存档于2016-02-18).
- Gillian Conahan. . Discover. December 20, 2011: 45 [2011-12-23]. (原始内容存档于2018-08-01).
- Sam Dansie. . BikeRadar. Apr 6, 2013 [2013-04-08]. (原始内容存档于2016-03-04).
There are some misconceptions about bike stability.
- Whitt, Frank R.; David G. Wilson. Second. Massachusetts Institute of Technology. 1982: 188, 198–233. ISBN 978-0-262-23111-4.
- . Dirt Rag Magazine. October 1, 2000 [2013-03-16]. (原始内容存档于August 21, 2012).
140 gram, fully hydraulic, bicycle steering damper
- Phillips, Matt. . Mountain Bike. April 2009: 39–45.
- Schwab, Arend L.; J. P. Meijaard. . Vehicle System Dynamics. 3 May 2013, 51 (7): 1059–1090. Bibcode:2013VSD....51.1059S. doi:10.1080/00423114.2013.793365.
- Brown, Sheldon. . [2009-05-21]. (原始内容存档于2020-06-04).
- Russ Tedrake. (PDF). 2009 [2012-05-31]. (原始内容存档 (PDF)于2015-08-07).
- Fajans, Joel. . [2006-08-23]. (原始内容存档于2006-09-01).
- Jan Heine. (PDF). Adventure Cyclist. June 2009 [2016-02-06]. (原始内容存档 (PDF)于2015-09-30).
Steering corrections affect a front load more directly than they do a rear load. This means that balancing a front load requires smaller steering corrections
- Kooijman and Schwab. (PDF). ASME. 2011 [2015-04-03]. (原始内容存档 (PDF)于2015-04-21).
- . [2008-06-28]. (原始内容存档于2008-07-23).
- Fajans, Joel. . [2006-08-04]. (原始内容存档于2006-09-01).
- REI. . [2007-11-13]. (原始内容存档于15 October 2007).
- Putnam, Josh. . 2006 [2006-08-08]. (原始内容存档于2011-04-30).
- Lennard Zinn. . Velo Press. 2004: 149.
I will begin simply by telling you that the way to increase the stability of a bicycle is to increase T (fork trail).
- Zinn, Lennard. . Velo News. 2004-12-21 [2006-08-04]. (原始内容存档于2006-06-19).
- Foale, Tony. . 1997 [2006-08-04]. (原始内容存档于July 20, 2006).
- Foale, Tony. Second. Tony Foale Designs. 2006. ISBN 978-84-933286-3-4.
- . [2009-08-05]. (原始内容存档于2011-07-26).
- Hand, Richard S. (PDF). 1988 [2006-08-04]. (原始内容 (PDF)存档于June 17, 2006).
- Fajans, Joel. (PDF). American Journal of Physics. July 2000, 68 (7): 654–659 [2006-08-04]. Bibcode:2000AmJPh..68..654F. doi:10.1119/1.19504. (原始内容 (PDF)存档于1 September 2006).
- McGill, David J; Wilton W. King. Third. PWS Publishing Company. 1995: 479–481. ISBN 978-0-534-93399-9.
- Kim Kreger. . Science. March 5, 2014 [2014-03-06]. (原始内容存档于2014-03-09).
- O. Dong, C. Graham, A. Grewal, C. Parrucci, and A. Ruina. (PDF). Vehicle System Dynamics. September 30, 2014, 52 (12): 1681–1694 [2014-10-11]. Bibcode:2014VSD....52.1681D. doi:10.1080/00423114.2014.956126. (原始内容存档 (PDF)于2018-12-23).
- Manfred Plochl; Johannes Edelmann; Bernhard Angrosch & Christoph Ott. . Vehicle System Dynamics. July 2011, 50 (3): 415–429. Bibcode:2012VSD....50..415P. doi:10.1080/00423114.2011.594164.
- Evangelou, Simos. (PDF). Imperial College London: 159. 2004 [2006-08-04]. (原始内容 (PDF)存档于1 September 2006).
- M. V. C. Evertse. (PDF). Delft University of Technology. November 5, 2010 [2017-09-27]. (原始内容存档 (PDF)于2021-01-23).
- Vittore Cossalter; James Sadauckas. . Vehicle System Dynamics. February 17, 2007, 44 (12): 903–920. doi:10.1080/00423110600742072.
- Klein, Richard E.; et al. . 2005 [2006-08-07]. (原始内容存档于October 27, 2005).
- Doria, A; Tognazzo, M. . Proc. Inst. Mech. Eng. C. 2014, 228 (17): 3116–3132. doi:10.1177/0954406214527073.
- Schwab, A. L.; J. P. Meijaard; J. D. G. Kooijman. (PDF). III European Conference on Computational Mechanics Solids, Structures and Coupled Problems in Engineering. 5–9 June 2006 [2008-10-19]. (原始内容存档 (PDF)于2016-03-22).
- Roe, G. E. and Thorpe, T. E. "A Solution of the low-speed wheel flutter instability in motorcycles" Journal Mechanical Engineering Science V 18 No. 2 1976
- Kettler, Bill. . Mail Tribune. 2004-09-15 [2006-08-04]. (原始内容存档于2017-03-03).
- Lennard Zinn. . 2008-12-30 [2009-01-02]. (原始内容存档于1 January 2009).
- Kooijman and Schwab. (PDF). Proceedings of the ASME 2009 International Design Engineering Technical Conferences IDETC/CIE 2009. August 30, 2009 [2012-11-08]. (原始内容存档 (PDF)于2015-04-30).
Therefore we conclude that riding a bicycle on a treadmill with constant belt velocity is dynamically equivalent to riding a bicycle on flat level ground around the straight ahead direction with constant speed.
- John Stevenson. . CyclingNews.com. March 24, 2004 [2012-11-08]. (原始内容存档于2013-06-23).
- Larry C. Papadopoulos; et al. . Oct 7, 2003 [2012-11-08]. (原始内容存档于2016-04-20).
- Cleary and Mohazzabi. . European Journal of Physics. 15 July 2011 [2012-11-08]. (原始内容存档于2015-08-11).
- Dressel and Papadopoulos. . European Journal of Physics. 23 May 2012 [2012-11-08].
- Cleary and Mohazzabi. . European Journal of Physics. 23 May 2012 [2012-11-08].
- Cocco, Gaetano. . Motorbooks. 2005: 40–46. ISBN 978-0-7603-1990-1.
- Ruina, Andy; Rudra Pratap. (PDF). Oxford University Press. 2002: 350 [2006-08-04]. (原始内容 (PDF)存档于12 September 2006).
- Wilson, David Gordon, 3rd, Massachusetts Institute of Technology: 245, 2004, ISBN 978-0-262-23237-1
- Cassidy, Chris. . [2009-05-22]. (原始内容存档于February 24, 2009).
- Marks. (PDF): 6. [2012-11-27]. (原始内容存档 (PDF)于2015-01-29).
- James R. Davis. . The Master Strategy Group. [2015-04-03]. (原始内容存档于2020-06-25).
Some motorcycles simply cannot, under normal conditions, perform a Stoppie. GoldWings and most Harley-Davidsons, for example. Before a Stoppie would occur you would wash out the front-end.
- Lieh, Junghsen. . 2012 [2015-03-27]. (原始内容存档于2020-06-23).
- Kurtus, Ron. . 2005-11-02 [2006-08-07]. (原始内容存档于2007-09-29).
- Brown, Sheldon "Front Brake". . 2008 [2012-11-20]. (原始内容存档于2021-04-26).
Maximum braking occurs when the front brake is applied so hard that the rear wheel is just about to lift off. Generally I advise against using both brakes at the same time.
- . 2015 [2015-04-04]. (原始内容存档于2016-07-26).
- John Forester. . MIT Press. 2012: 249. ISBN 9780262516945.
Use both levers equally at first.
- . [2008-06-23]. (原始内容存档于11 June 2008).
- Mirbod, S. M.; Yoshida, Hideyo; Jamali, Marjan; Masamura, Kazuhito; Inaba, Ryoichi; Iwata, Hirotoshi. . International Archives of Occupational and Environmental Health. 1997, 70 (1): 22–28. PMID 9258704. doi:10.1007/s004200050182.
- . [2008-06-25]. (原始内容存档于2009-02-28).
- Strickland, Bill. . Bicycling Magazine. August 2008, XLIV (7): 118–122.
- Rao, Singiresu S. fourth. Pearson, Prntice Hall. 2004. ISBN 978-0-13-048987-6.
- . [2008-06-24]. (原始内容存档于April 23, 2008).
- . [2008-06-23]. (原始内容存档于2011-05-14).
- . [2008-06-27]. (原始内容存档于2009-08-05).
- . [2008-06-24]. (原始内容存档于2008-07-24).
- . [2008-06-23]. (原始内容存档于2008-10-11).
- . [2008-06-24]. (原始内容存档于2008-08-21).
- (PDF). [2008-06-23]. (原始内容存档 (PDF)于2012-02-08).
- . WebBikeWorld. 2 April 2005. (原始内容存档于19 February 2018).
- Gromer, Cliff. . Popular Mechanics. 2001-02-01 [2006-08-07]. (原始内容存档于16 July 2006).
- Schwab, Arend; et al. . Delft University of Technology. 2006–2012. (原始内容存档于2021-03-09).
- . [2012-11-12]. (原始内容存档于2012-10-27).
延伸閱讀
- An Introduction to Bicycle Geometry and Handling (页面存档备份,存于), Karl Anderson
- What keeps the bicycle upright? (页面存档备份,存于) by Jobst Brandt|Jobst Brandt
- Report on Stability of the Dahon Bicycle (页面存档备份,存于) by John Forester
外部連結
影片:
- Video of riderless bicycle demonstrating self-stability (页面存档备份,存于)
- Why bicycles do not fall: Arend Schwab at TEDx Delft 2012 (页面存档备份,存于)
- Wobble movie (AVI) (页面存档备份,存于)
- Weave movie (AVI) (页面存档备份,存于)
- Wobble Crash (Flash) (页面存档备份,存于)
- Video on Science Friday
研究中心:
- Bicycle Dynamics (页面存档备份,存于) at Delft University of Technology
- Bicycle Mechanics (页面存档备份,存于) at Cornell University
- Bicycle Science at the University of Illinois
- Motorcycle Dynamics (页面存档备份,存于) at the University of Padova
- Control and Power Research Group (页面存档备份,存于) at Imperial College
- Bicycle dynamics, control and handling at UC Davis
- Bicycle and Motorcycle Engineering Research Laboratory (页面存档备份,存于) at the University of Wisconsin-Milwaukee
研討會:
- Bicycle and Motorcycle Dynamics 2010 (页面存档备份,存于): Symposium on Dynamics and Control of Single Track Vehicles, Delft University of Technology, Oct 20-22, 2010
- Single Track Vehicle Dynamics at DSCC 2012: two sessions at the ASME Dynamic Systems and Control Conference in Fort Lauderdale, Florida, USA, October 17–19, 2012
- Bicycle and Motorcycle Dynamics 2013 (页面存档备份,存于): Symposium on Dynamics and Control of Single Track Vehicles, Nihon University, Nov 11-13, 2013
- Bicycle and Motorcycle Dynamics 2016 (页面存档备份,存于): Symposium on Dynamics and Control of Single Track Vehicles, University of Wisconsin–Milwaukee, Sept 21-23, 2016
- Bicycle and Motorcycle Dynamics 2019 (页面存档备份,存于): Symposium on Dynamics and Control of Single Track Vehicles, University of Padova, Sept, 9–11, 2019
- Bicycle and Motorcycle Dynamics Conference (页面存档备份,存于): Summary page